
6. SVM#
Introducción
Las máquinas de vectores de soporte (SVM) propuestas por Vapnik (1996, 1998), se caracterizan por ser un proceso interno de construcción de reglas de clasificación, bastante diferente al de las de los métodos estadísticos. Las SVM suelen ser eficaces en casos en los que los métodos de clasificación tradicionales no lo son, como por ejemplo, los problemas basados en datos con estructura no lineal, además las SVM se han adaptado y aplicado en muchos campos de investigación. En esta sección, nos centramos en las SVM para la solución de problemas de regresión y clasificación, así como también el proceso de construcción, luego abordaremos los pasos de su extensión, de sistemas lineales a sistemas no lineales.
El paradigma algorítmico de las SVM aborda el reto de la complejidad de la muestra mediante la búsqueda de separadores de “mayor margen”. A grandes rasgos, un semiespacio separa un conjunto de entrenamiento con un gran margen si todos los ejemplos no sólo están en el lado correcto del hiperplano de separación, sino también lejos de él. Restringir el algoritmo a la salida de un separador de gran margen puede producir una complejidad de muestra pequeña, incluso si la dimensionalidad del espacio de características es alta (e incluso infinita). Introduciremos el concepto de margen y lo relacionamos con el paradigma de minimización de pérdidas regularizadas.
6.1. Análisis#
6.2. Espacios de Hilbert con Kernel reproductor#
Sea \(H\) un espacio lineal de funciones reales definidas sobre \(\mathcal{X}\subseteq\mathcal{R}^{l}\). Además, suponga que \(H\) es un espacio de Hilbert, con producto interno \(\langle\cdot,\cdot\rangle_{H}\) que induce la norma \(\|\cdot\|_{H}\), con respecto a la cual \(H\) es completo.
Definition 6.1
Un espacio de Hilbert \(H\) es llamado espacio de Hilbert con kernel reproductor (RKHS) si existe una función:
con las siguientes propiedades:
Para cada \(\boldsymbol{x}\in\mathcal{X},~\kappa(\cdot, \boldsymbol{x})\) pertenece a \(H\)
\(\kappa(\cdot, \cdot)\) tiene la llamada propiedad de reproducción, esto es:
Una consecuencia directa de la propiedad reproductora es, si definimos \(f(\cdot)=\kappa(\cdot, \boldsymbol{y}),~\boldsymbol{y}\in\mathcal{X}\) entonces
Observación
Un espacio de Hilbert con kernel reproductor (RKHS) tiene la Propiedad (6.1), para todo \(f \in H\) y \(x \in \mathcal{X}\).
Caso lineal en \(\mathbb{R}^2\)
Espacio y producto interno. Sea \(H=\mathbb{R}^2\) con el producto interior usual:
\[ \langle u,v\rangle_H = u_1 v_1 + u_2 v_2. \]Función \(f\) como vector. Sea \(w=(w_1,w_2)\). Definimos
\[ f(y)=\langle w,y\rangle_H = w_1 y_1 + w_2 y_2. \]Aquí identificamos \(f\) con el vector \(w\).
Kernel lineal y su representante. El kernel lineal es
\[ \kappa(x,x') = \langle x,x'\rangle_H. \]Para un punto fijo \(x\), la función
\[ \kappa(\cdot,x): y \mapsto \langle y,x\rangle_H \]corresponde al vector \(x\) en \(H\).
Producto interior entre funciones. Entonces:
\[ \langle f, \kappa(\cdot,x)\rangle_H = \langle w,x\rangle_H. \]Pero como
\[ f(x)=\langle w,x\rangle_H, \]se cumple la propiedad de reproducción.
Ejemplo numérico
Sea \(w=(2,1)\), \(x=(3,4)\).
Evaluación directa:
\[ f(x)=\langle w,x\rangle = 2\cdot 3 + 1\cdot 4 = 10. \]Función del kernel:
\[ \kappa(\cdot,x)(y)=\langle y,x\rangle = 3y_1 + 4y_2. \]Producto interior:
\[ \langle f,\kappa(\cdot,x)\rangle_H = \langle w,x\rangle = 10. \]
Conclusión:
\[ f(x) \;=\; \langle f,\kappa(\cdot,x)\rangle_H \]Generalización a kernels no lineales: En un RKHS general se introduce un mapa de características \(\Phi\) tal que:
\[ \kappa(x,x') = \langle \Phi(x),\Phi(x')\rangle_H. \]En este caso, \(\kappa(\cdot,x)\) corresponde a \(\Phi(x)\), y la propiedad de reproducción toma la forma:
\[ f(x)=\langle f,\Phi(x)\rangle_H. \]El teorema de representación de Riesz garantiza que siempre existe un único elemento \(k_x \in H\) (llamado representador de la evaluación en \(x\)) tal que:
\[ f(x)=\langle f, k_x \rangle_H, \quad \text{con } k_x = \kappa(\cdot,x). \]
Definition 6.2
Sea \(H\) un (RKHS) asociado con una función kernel \(\kappa(\cdot, \cdot)\) y \(\mathcal{X}\) un conjunto de elementos. Entonces el mapeo
es conocido como mapeo de características y el espacio \(H\) es el espacio de características. Esto es \(\Phi\) mapea cada vector \(\boldsymbol{x}\in\mathcal{X}\) en el (RKHS) \(H\).
\(H\) puede ser de dimensión finita o inifinita y sus elementos pueden ser funciones. Esto es, cada punto de entrenamiento es mapeado en un espacio de funciones. Si \(H\) es de dimensión finita, por ejemplo el Espacio Euclidiano \(\mathbb{R}^{k},~\Phi(\boldsymbol{x})\in\mathbb{R}^{k}\).
Consideraremos el caso de dimensión infinita cuyas imágenes son funciones de \(\Phi(\cdot)\). Veamos las ventajas de este mapeo, del espacio original a otro de dimensión infinita (RKHS).
Definition 6.3
Sean \(\boldsymbol{x}, \boldsymbol{y}\in\mathcal{X}\subseteq\mathbb{R}^{l}\), entonces el producto interno del respectivo mapeo de imágenes es escrito como:
o
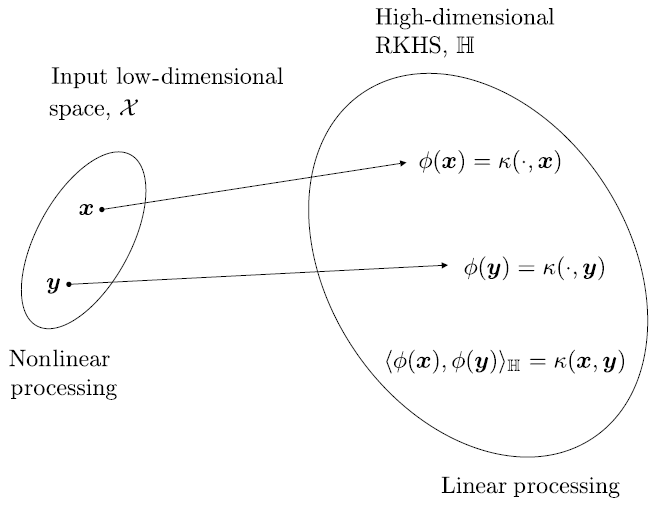
Empleando este tipo de mapeo a nuestro problema, calculamos operaciones de producto interno en \(H\) en una manera eficiente, vía evaluación de funciones sobre el espacio de baja dimensión.
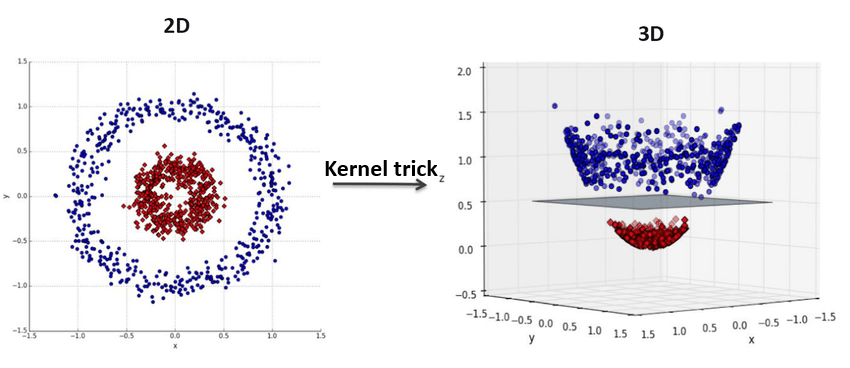
Fig. 6.1 Ilustración de la propiedad kernel trick. Fuente [Hachimi et al., 2020].#
Property 6.1
El mapeo \(\Phi(\cdot)\) satisface las siguientes propiedades
Mapea implícitamente inputs (datos de entrenamiento) en un espacio RKHS
Soluciona tareas de estimación lineal en \(H\), involucrando las imágenes:
Proyecta el algoritmo que soluciona problemas de parámetros desconocidos, en términos del producto interno en la forma:
Considera la evaluación kernel como el producto interno:
Nótese que este procedimiento de mapeo explicito es necesario para calcular la operación kernel en el último paso. La forma especifica de \(\kappa(\cdot,\cdot)\) no concierne en el análisis.
Example 6.1
Considere el caso del espacio de 2 dimensiones y el mapeo
Entonces, dados los vectores \(\boldsymbol{x}=(x_{1}, x_{2})^{T}\) y \(\boldsymbol{y}=(y_{1}, y_{2})^{T}\), es facil ver que
Es decir, el producto interior en el espacio tridimensional, después del mapeo, está dado en términos de una función de las variables en el espacio original.
Property 6.2
Sea \(\mathcal{X}\) un conjunto de puntos. Típicamente, \(\mathcal{X}\subseteq\mathbb{R}^{l}\) es compacto, esto es, cada sucesión en \(X\) tiene una subsucesión convergente. Sea \(\kappa\) la función
La función \(\kappa\) es llamada kernel definido positivo si satisface
para cualquier número real \(a_{n}, a_{m}\) y cualquier punto \(x_{n}, x_{m}\in\mathcal{X}\) y cualquier \(N\in\mathbb{N}\). O equivalentemente, si definimos la matriz \(K\), de orden \(N\)
\(a^{T}Ka\geq0\), donde \(a=(a_{1}, a_{2},\dots, a_{N})^{T}\).
Example 6.2
Los siguientes son algunos ejemplos típicos de funciones kernel, las cuales son comúnmente usadas en varias aplicaciones. Estas funciones kernel son utilizadas en Python para los modelos SVC y SVR (ver kernel-functions).
El kernel gaussiano está entre las más populares y está dado por la función
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=\exp\left(-\frac{\|\boldsymbol{x}-\boldsymbol{y}\|^{2}}{2\sigma^2}\right),\quad\sigma>0 \]El kernel polinomial homogéneo tiene la forma
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=(\boldsymbol{x}^{T}\boldsymbol{y})^{r}, \]donde \(r\) es un parámetro.
El kernel polinómico no-homogéneo tiene la forma
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=(\boldsymbol{x}^{T}\boldsymbol{y}+c)^{r}, \]donde \(c\geq0,~r\) son parámetros.
El kernel laplaciano está dado por
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=\exp(-t\|\boldsymbol{x}-\boldsymbol{y}\|), \]donde \(t>0\) es un parámetro.
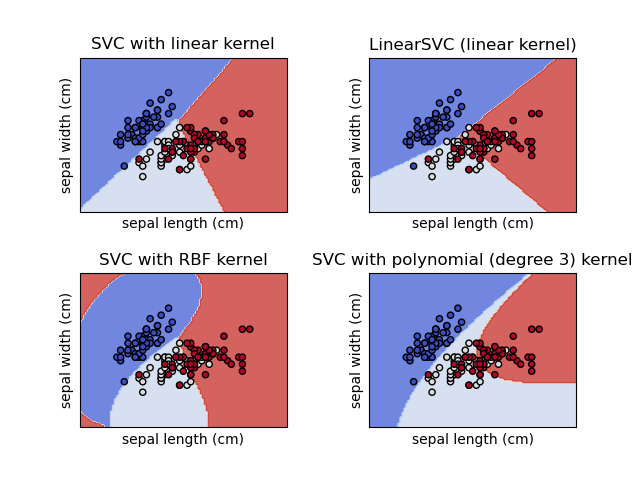
Fig. 6.2 SVC y LinearSVC para clasificación en un conjunto de datos. Ver scikit-learn.#
6.3. Construcción de kernels#
Además de los ejemplos previos, se pueden construir otros kernels aplicando las siguientes propiedades
Si
\[\begin{split} \kappa_{1}(\boldsymbol{x}, \boldsymbol{y}):\mathcal{X}\times\mathcal{X}\mapsto\mathbb{R}\\ \kappa_{1}(\boldsymbol{x}, \boldsymbol{y}):\mathcal{X}\times\mathcal{X}\mapsto\mathbb{R}\end{split}\]son kernels, entonces
\[\begin{split} \kappa(\boldsymbol{x}, \boldsymbol{y})=\kappa_{1}(\boldsymbol{x}, \boldsymbol{y})+\kappa_{2}(\boldsymbol{x}, \boldsymbol{y})\\ \kappa(\boldsymbol{x}, \boldsymbol{y})=\alpha\kappa_{1}(\boldsymbol{x}, \boldsymbol{y})\end{split}\]y
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=\kappa_{1}(\boldsymbol{x}, \boldsymbol{y})\kappa_{2}(\boldsymbol{x}, \boldsymbol{y}), \]son kernels.
Sea
\[ f:\mathcal{X}\mapsto\mathbb{R} \]entonces
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=f(\boldsymbol{x})f(\boldsymbol{y}) \]es un kernel
Sea una función
\[ g:\mathcal{X}\mapsto\mathbb{R}^{l} \]y una función kernel
\[ \kappa_{1}(\cdot, \cdot):\mathbb{R}^{l}\times\mathbb{R}^{l}\mapsto\mathbb{R}. \]Entonces
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=\kappa_{1}(g(\boldsymbol{x}), g(\boldsymbol{y})) \]es también un kernel.
Sea \(A\) una matriz definida positiva con dimensión \(l\times l\). Entonces
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=\boldsymbol{x}^{T}A\boldsymbol{y} \]es un kernel.
Si
\[ \kappa_{1}(\boldsymbol{x}, \boldsymbol{y}):\mathcal{X}\times\mathcal{X}\mapsto\mathbb{R}, \]entonces
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=\exp(\kappa_{1}(\boldsymbol{x}, \boldsymbol{y})) \]es también un kernel, y si \(p(\cdot)\) es un polinomio con coeficientes no negativos,
\[ \kappa(\boldsymbol{x}, \boldsymbol{y})=p(\kappa_{1}(\boldsymbol{x}, \boldsymbol{y})) \]también es un kernel.
Para mas información sobre los kernel y su construción (ver [Hofmann et al., 2008, Shawe-Taylor et al., 2004, Slavakis et al., 2014]).
6.4. Teorema de representación#
El teorema que se presentará en esta sección es de gran importancia desde un punto de vista práctico. Este nos permite llevar a cabo, optimización empírica de funciones de pérdida, basado en un conjunto finito de puntos de entrenamiento, en una manera muy eficiente si la función a estimar pertenece a un espacio de dimensión alta o incluso infinita \(H\).
Theorem 6.1
Sea
una función arbitraria, estrictamente monotona creciente. Sea también
una función de pérdida. Entonces, cada minimizador \(f\in H\), de una tarea de minimización regularizada
admite una representación de la forma
donde \(\theta_{n}\in\mathbb{R},~n=1,2,\dots,N\). La regularización de la forma \(\Omega(\|f\|^{2})\) es una función cuadrática, y por lo tanto estrictamente monotona en el intervalo \([0, \infty)\).
Demostración
Sea
Dado que cada \(\kappa(\cdot, \boldsymbol{x}_{i})\in H,~i=1,2,\dots,N,~A\subseteq H\) y \(N<\infty\), entonces, \(A\) es cerrado.
Por Teorema de descomposición ortogonal, como \(A\) es un subespacio cerrado de \(H\), entonces, \(H=A\oplus A^{T}\). Esto es, si \(f\in H\) entonces
donde \(f_{\perp}\) es la parte de \(f\) que es ortogonal a \(A\).
Usando la propiedad reproductora (6.1) se tiene que \(\forall f\in H\)
Nótese que la propiedad de reproducción garantiza que en los puntos de entrenamiento el valor de \(f\) no depende de \(f_{\perp}\), y, por lo tanto, tampoco el primer término de \(\min_{f\in H}J(f)\) en (6.2).
Además, para todo \(f_{\perp}\) tenemos que:
Por lo tanto para cualquier selección de \(\theta_{n},~n=1,2,\dots,N\), la función de coste es minimizada por \(f_{\perp}=0\).
Observation 6.1
La importancia de este teorema radica en que, para optimizar \(J(f)\) en (6.2) con respecto a \(f\), usamos la expresión \(f(\cdot)\) en (6.1) y la minimización es llevada a cabo con respecto a los parámetros \(\theta_{n},~n=1,2,\dots,N\).
En casos que la regularización no es necesaria, usualmente un término de sesgo es agregado y se supone que la función a minimizar admite la representación
\[ \tilde{f}=f+b,\quad f(\cdot)=\sum_{n=1}^{N}\theta_{n}\kappa(\cdot, \boldsymbol{x}_{n}) \]
La esencia del siguiente teorema es expandir la solución en dos partes. Una que pertenece al RKHS, \(H\), y otra que está dada como una combinación lineal de un conjunto de funciones preseleccionadas.
Theorem 6.2 (Teorema de representación semiparamétrico)
Supongamos que adicionalmente a los supuestos adoptados en el Theorem 6.1, es dado el siguiente conjunto de funciones reales
con la propiedad que la matriz de \(N\times M\) con elementos \(\varphi_{m}(\boldsymbol{x}_{n})\), \(~n=1,2,\dots,N\), \(~m=1,2,\dots,M\), tiene rango \(M\). Entonces, cualquier
que soluciona la tarea de minimización
admite la representación
Observation 6.2
Un ejemplo de aplicación exitosa de este teorema fue demostrada en el contexto de procesamiento de imágenes [Bouboulis et al., 2010]. Un conjunto de funciones no lineales en lugar de \(\psi_{m}\) fueron usadas para detección de bordes en una imagen con (saltos no suaves). La parte de \(f\) que pertenece al espacio RKHS es usada para las partes suaves en la imagen.
6.5. Regresión ridge con Kernel#
En esta sección abordaremos la tarea de regresión ridge en un espacio general RKHS. El camino a seguir es el usado típicamente para extender técnicas, las cuales han sido desarrolladas para modelos lineales, a espacios más generales RKSH.
Sea \((y_{n}, \boldsymbol{x}_{n})\in\mathbb{R}\times\mathbb{R}^{l}\) la representación de un mecanismo de generación de datos, modelados vía tarea de regresión no lineal
\[ y_{n}=g(\boldsymbol{x}_{n})+\eta_{n},\quad n=1,2,\dots,N. \]Denotemos por \(f\) es el estimador de la función \(g\) desconocida. \(f\) es llamada la hipótesis y \(H\) el espacio de hipótesis, donde \(f\) es buscada. Supongamos que \(f\) está en RKHS y está asociada con el kernel
Por el teorema de representación se tiene que
De acuerdo a la regresión ridge con kernel, los coeficientes desconocidos son estimados por medio de la siguiente tarea
(6.3)#\[ \hat{\theta}=\text{argmin}_{\theta} J(\theta),\quad J(\theta)=\sum_{n=1}^{N}\left(y_{n}-\sum_{m=1}^{N}\theta_{m}\kappa(\boldsymbol{x}_{n}, \boldsymbol{x}_{m})\right)^{2}+C\langle f, f\rangle, \]donde \(C\) es el parámetro de regularización. La Ecuación (6.3) puede reescribirse como
(6.4)#\[ J(\theta)=(\boldsymbol{y}-K\theta)^{T}(\boldsymbol{y}-K\theta)+C\theta^{T}K\theta, \]donde \(\boldsymbol{y}=(y_{1}, y_{2},\dots, y_{N})^{T}\) y \(\theta=(\theta_{1}, \theta_{2}, \dots,\theta_{M})^{T}\), \(K\) es la matriz kernel tal que \(\langle\kappa(\cdot, \boldsymbol{x}_{m}), \kappa(\cdot, \boldsymbol{x}_{m})\rangle=\kappa(\boldsymbol{x}_{m}, \boldsymbol{x}_{n})\), y \(y\) es determinada por la función kernel y los valores de entrenamiento.
Minimizando \(J(\theta)\) con respecto a \(\theta\) y suponiendo que \(K^{T}=K\) es invertible, utilizando el mismo procedimiento en la regresión ridge, tenemos que
Una vez \(\hat{\theta}\) es obtenido, dado un vector \(\boldsymbol{x}\in\mathbb{R}^{l}\) la correspondiente predicción de la variable dependiente está dada por:
\[ \hat{\boldsymbol{y}}=\sum_{n=1}^{N}\hat{\theta}_{n}\kappa(\boldsymbol{x}, \boldsymbol{x}_{n})=\theta^{T}\boldsymbol{\kappa}(\boldsymbol{x})=\boldsymbol{y}^{T}(K+CI)^{-1}\boldsymbol{\kappa}(\boldsymbol{x}), \]donde \(\boldsymbol{\kappa}(\boldsymbol{x})=(\kappa(\boldsymbol{x},\boldsymbol{x}_{1}),\dots,\boldsymbol{\kappa}(\boldsymbol{x}, \boldsymbol{x}_{N}))^{T}\).
6.6. Regresión de vectores de soporte#
Método de mínimos módulos
El método de mínimos cuadrados no es siempre el mejor criterio de optimización, debido a que, en presencia de ruido no Gaussiano con colas largas y por lo tanto número creciente de outliers, la dependencia cuadrática de el método se sesga hacia valores asociados con presencia de outliers
Una manera de darle solución a este problema es escoger una función de pérdida que se ajuste mejor al modelo del ruido (ver Huber 1992, [Huber, 1992]). Bajo el supuesto de que el ruido tiene función de densidad de probabilidad (fdp) simétrica, la tarea optima de regresión es obtenida minimizando la función de pérdida
\[ \mathcal{L}(y, f(\boldsymbol{x}))=|y-f(\boldsymbol{x})| \]la cual es conocida como el método de mínimos módulos.
Pérdida de Huber
Huber demostró que si el ruido tiene dos componentes: Gaussiana y otra fdp arbitraria (simétrica), entonces la mejor función de pérdida en el sentido minimax está dada por:
\[\begin{split} \mathcal{L}(y, f(\boldsymbol{x}))= \begin{cases} \displaystyle{\varepsilon|y-f(\boldsymbol{x})|-\varepsilon^{2}/2} & \text{si}~|y-f(\boldsymbol{x})|>\varepsilon,\\[2mm] \displaystyle{|y-f(\boldsymbol{x})|/2-\varepsilon^{2}/2} & \text{si}~|y-f(\boldsymbol{x})|\leq\varepsilon, \end{cases} \end{split}\]para algún parámetro \(\varepsilon\). Esta es conocida como función de pérdida de Huber.
Pérdida \(\varepsilon\)-insensible
Una función de pérdida que se aproxima a la de Huber y tiene excelentes propiedades computacionales es llamada función de pérdida lineal \(\varepsilon\)-insensible y está dada por
(6.5)#\[\begin{split} \mathcal{L}(y, f(\boldsymbol{x}))= \begin{cases} |y-f(\boldsymbol{x})|-\varepsilon & \text{si}~|y-f(\boldsymbol{x})|>\varepsilon\\[2mm] 0 & \text{si}~|y-f(\boldsymbol{x})|\leq\varepsilon \end{cases} \end{split}\]y la función de pérdida cuadrática \(\epsilon\)-insensible
\[\begin{split} \mathcal{L}(y, f(\boldsymbol{x}))= \begin{cases} |y-f(\boldsymbol{x})|^{2}-\varepsilon & \text{si}~|y-f(\boldsymbol{x})|>\varepsilon\\[2mm] 0 & \text{si}~|y-f(\boldsymbol{x})|\leq\varepsilon \end{cases} \end{split}\]la cuales coinciden con la función de pérdida de mínimos módulos para \(\varepsilon=0\) y es cercana a la función de pérdida de Huber para \(\varepsilon<1\).
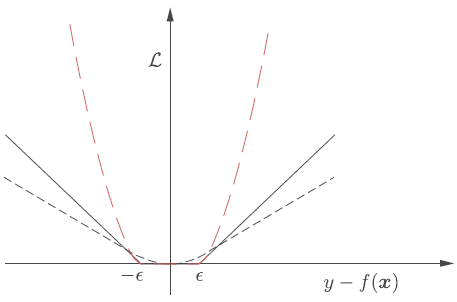
Fig. 6.3 Función de pérdida de Huber (gris punteado). Función de pérdida lineal \(\varepsilon\)-insensible (gris completo). Función de pérdida cuadrática \(\varepsilon\)-insensible (rojo) para \(\varepsilon = 0.7\). Fuente [Theodoridis, 2020].#
Observación
La función de pérdida \(\epsilon\)-insensible se utiliza en escenarios donde queremos que nuestro modelo tolere errores hasta cierto punto. La pérdida \(\epsilon\)-insensible permite que el modelo sea menos sensible a valores atípicos o puntos de datos ruidosos
La función de pérdida \(\epsilon\)-insensible proporciona una herramienta útil para construir modelos que sean robustos, flexibles y capaces de equilibrar la precisión con la generalización, especialmente en situaciones donde los datos pueden contener ruido o valores atípicos.
6.7. Regresión óptima lineal \(\varepsilon\)-insensible#
Usaremos la función de pérdida lineal \(\varepsilon\)-insensible (6.5) para cuantificar el error de desajuste del modelo. El valor de \(\epsilon\) determina la cantidad de “slack” (grado de error) que se permite.
Trataremos la tarea de regresión
\[ y=g(\boldsymbol{x})+\eta_{n}, \]usando un model lineal de la forma:
\[ f(\boldsymbol{x})=\boldsymbol{\theta}^{T}\boldsymbol{x}+\theta_{0}. \]La solución más general en la que \(f\) es una función en RKHS será obtenida vía kernel trick (producto interno reemplazado por evaluación de kernel).
Introducimos ahora dos conjuntos de variables auxiliares
(6.6)#\[ \text{Si}~ y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}\geq\varepsilon,~\text{definimos}~\tilde{\xi}_{n}~\text{tal que},\quad y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}\leq\varepsilon+\tilde{\xi}_{n}. \]Nótese que idealmente, deseamos seleccionar \(\boldsymbol{\theta}, \theta_{0}\) tales que \(\tilde{\xi}_{n}=0\), dado que este valor entregaría la contribución del respectivo término en la función de pérdida igual a cero, pues \(\mathcal{L}(y, f(\boldsymbol{x}))=0\) si \(|y-f(\boldsymbol{x})|\leq\varepsilon\). Análogamente,
(6.7)#\[ \text{Si}~ y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}\leq-\varepsilon,~\text{definimos}~\xi_{n}~\text{tal que},\quad\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0}-y_{n}\leq\varepsilon+\xi_{n}. \]
Estamos ahora listos para formular la tarea de minimización para el correspondiente coste empírico, regularizado por la norma de \(\boldsymbol{\theta}\), el cual es proyectado en términos de las variables auxiliares como:
El término \(\frac{1}{2}\|\boldsymbol{\theta}\|^{2}\), surge de la necesidad de maximizar el margen asociado al hiperplano que separa dos clases (ver sección máquinas de vectores de soporte Vapnik and Chervonenkis 1960s).
Dicho margen: \(2/\|\boldsymbol{\theta}\|\), el cual, en problemas de clasificación, se desea maximizar, es equivalente a minimizar la norma \(\frac{1}{2}\|\boldsymbol{\theta}\|^2\) para el caso de modelos regresivos. El factor \(\frac{1}{2}\) es incluido de forma numéricamente conveniente, y no altera la solución. A este tipo de problemas se les denomina de programación cuadrática.
¿Por qué maximizar el margen?
Maximizar el margen permite lograr un buen rendimiento de generalización. El margen representa el nivel de confianza del clasificador, y maximizarlo ayuda a minimizar el error de generalización.
Maximizar el margen corresponde a minimizar la Dimensión VC (Vapnik-Chervonenkis), que es una medida de la capacidad o complejidad del modelo. Al maximizar el margen, SVM busca encontrar el límite de decisión más simple que separa las clases de manera efectiva, lo que conduce a una mejor generalización a datos no vistos.
Maximizar el margen ayuda a crear un límite de decisión que es robusto al ruido y a los valores atípicos en los datos de entrenamiento. Al enfocarse en los puntos de datos cerca del margen, SVM puede tolerar mejor el ruido y los valores atípicos, lo que lleva a un clasificador más confiable y preciso.
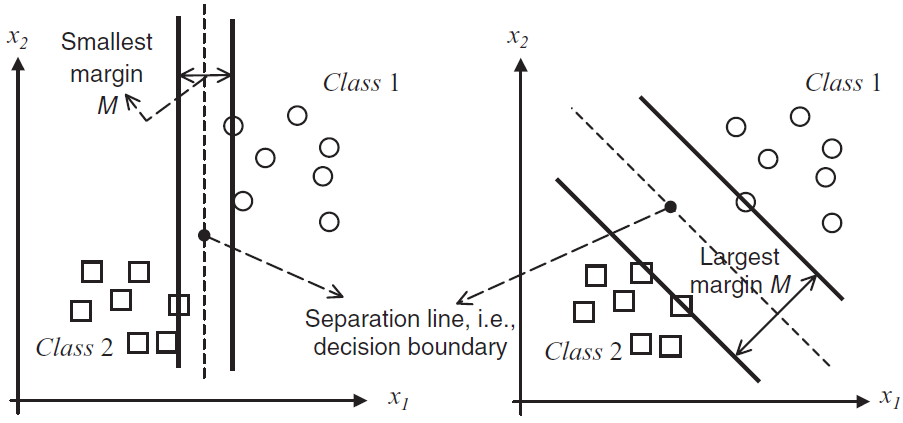
Fig. 6.4 Dos líneas de separación: una buena con un margen grande (derecha) y una línea de separación menos aceptable con un margen pequeño (izquierda).#
Las variables auxiliares, \(\tilde{\xi}_{n}\) y \(\xi_{n},~ n=1,2,\dots,N\) que miden el exceso de error con respecto a \(\varepsilon\), son conocidas como variables de relajación. Nótese que cualquier contribución de la función de coste, para un error obtenido con un valor absoluto menor o igual que \(\varepsilon\) es cero. La tarea de optimización previa, intenta estimar \(\boldsymbol{\theta}, \theta_{0}\) tal que valores de error mayores que \(\epsilon\) y menores que \(-\epsilon\) sean minimizados.
Por lo tanto, la tarea de optimización es equivalente a minimizar la función de pérdida empírica
\[ \frac{1}{2}\|\boldsymbol{\theta}\|^{2}+C\sum_{n=1}^{N}\mathcal{L}(y_{n}, \boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0}), \]donde la función de pérdida \(\mathcal{L}\) es \(\varepsilon\)-insensible.
Nótese que debido a que el problema de optimización con restricción involucra las variables de relajación con valores históricos, empleamos el kernel trick.
Solución
La solución de la tarea de optimización es obtenida introduciendo los multiplicadores de Lagrange y formando el correspondiente Lagrangiano. Habiendo obtenido los multiplicadores, la solución estaría dada por
\[ \hat{\boldsymbol{\theta}}=\sum_{n=1}^{N}(\tilde{\lambda}_{n}-\lambda_{n})\boldsymbol{x}_{n}, \]donde \(\tilde{\lambda}_{n},\lambda_{n},~ n=1,2,\dots,N\), son los multiplicadores asociados con cada una de las restricciones.
Los multiplicadores de Lagrange son distintos de cero, solo para puntos \(\boldsymbol{x}_{n}\), que corresponden a valores de error ya sean iguales o mayores que \(\varepsilon\). Estos son conocidos como vectores de soporte.
Puntos para los que el valor del puntaje de error es menor que \(\varepsilon\), corresponden a multiplicadores de Lagrange ceros y por lo tanto no son vectores de soporte y no participan en la construcción de la función de decisión
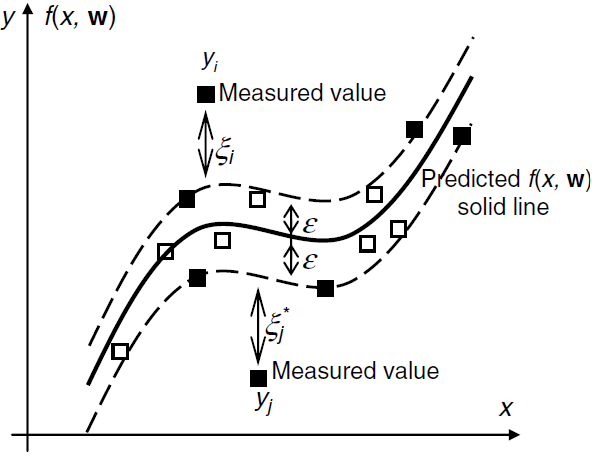
Fig. 6.5 Parámetros utilizados en la regresión de vectores de soporte (unidimensional). Cuadrados rellenos son vectores de soporte, y los vacíos no lo son. Por lo tanto, los SV sólo pueden aparecer en el límite del tubo o fuera del tubo#
El término de sesgo \(\hat{\theta}_{0}\) puede ser obtenido a partir de las ecuaciones
(6.8)#\[\begin{split} \begin{align} y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}&=\varepsilon,\\[2mm] \boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0}-y_{n}&=\varepsilon, \end{align} \end{split}\]donde \(n\) recorre todos los puntos que forman un subconjunto de vectores de soporte, esto es, puntos asociados con:
\[ \tilde{\lambda}_{n}>0,~(\lambda_{n}>0)\quad\text{y}\quad\tilde{\xi}_{n}=0,~(\xi_{n}=0). \]En la práctica, \(\hat{\theta}_{0}\) es obtenido a partir del promedio de todas las ecuaciones en (6.8).
Una vez \(\hat{\boldsymbol{\theta}}, \hat{\theta}_{0}\) han sido obtenidos, estamos listos para realizar predicciones. Dado un valor \(\boldsymbol{x}\), primero desarrollamos el mapeo (implícito) usando el mapeo de características \(\boldsymbol{x}\longmapsto\kappa(\cdot, \boldsymbol{x})\) obtenemos
\[ \hat{y}(\boldsymbol{x})=\langle\hat{\boldsymbol{\theta}}, \kappa(\cdot, \boldsymbol{x})\rangle+\hat{\theta}_{0}, \]o bien,
\[ \hat{y}(\boldsymbol{x})=\sum_{n=1}^{N_{s}}(\tilde{\lambda}_{n}-\tilde{\lambda}_{n})\kappa(\boldsymbol{x}, \boldsymbol{x}_{n})+\hat{\theta}_{0},\quad\text{Predicción SVR}, \]donde \(N_{s}\leq N\), es el número de multiplicadores de Lagrange distintos de cero. Nótese que esta última es una expansión en términos de funciones kernel no lineales.
Solución de la tarea de optimización
La tarea de optimización con desigualdades de restricción, satisface las condiciones de Karush–Kuhn–Tucker (KKT)
\[\begin{split} \begin{align*} &\frac{\partial L}{\partial\boldsymbol{\theta}}=\boldsymbol{0},~\frac{\partial L}{\partial\theta_{0}}=0,~\frac{\partial L}{\partial\tilde{\xi}_{n}}=0,~\frac{\partial L}{\partial\xi_{n}}=0,\\[2mm] &\tilde{\lambda}_{n}(y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}-\varepsilon-\tilde{\xi}_{n})=0,\quad n=1,2,\dots,N,\\[2mm] &\lambda_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0}-y_{n}-\varepsilon-\xi_{n})=0,\quad n=1,2,\dots,N,\\[2mm] &\tilde{\mu}_{n}\tilde{\xi}_{n}=0,\quad n=1,2,\dots,N,\\[2mm] &\mu_{n}\xi_{n}=0,\quad n=1,2,\dots,N,\\[2mm] &\tilde{\lambda}_{n}\geq0,~\lambda_{n}\geq0,~\tilde{\mu}_{n}\geq0,~\mu_{n}\geq0,\quad n=1,2,\dots,N, \end{align*} \end{split}\]con respecto al Lagrangiano
(6.9)#\[\begin{split} \begin{align*} L(\boldsymbol{\theta}, \theta_{0}, \tilde{\xi}, \xi, \lambda, \mu)&=\frac{1}{2}\|\boldsymbol{\theta}\|^{2}+C\left(\sum_{n=1}^{N}{\xi}_{n}+\sum_{n=1}^{N}\tilde{\xi}_{n}\right)\\ &+\sum_{n=1}^{N}\tilde{\lambda}_{n}(y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}-\varepsilon-\tilde{\xi}_{n})\\ &+\sum_{n=1}^{N}\lambda_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0}-y_{n}-\varepsilon-\xi_{n})\\ &-\sum_{n=1}^{N}\tilde{\mu}_{n}\tilde{\xi}_{n}-\sum_{n=1}^{N}\mu_{n}\xi_{n}, \end{align*} \end{split}\]donde \(\tilde{\lambda}_{n},~\lambda_{n},~\tilde{\mu}_{n},~\mu_{n}\) son los multiplicadores de Lagrange.
Sumando las restricciones (multiplicando cada restricción por \(\tilde{\lambda}_{n},\lambda_{n}, \tilde{\xi}_{n}, \xi_{n}\)), se tiene que:
\[ \tilde{\lambda}_{n}\lambda_{n}((y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}-\varepsilon)(\xi_{n}-\tilde{\xi}_{n})-2\tilde{\xi}_{n}\xi_{n})=0, \]dado que los multiplicadores de Lagrange que participan en la solución \(\hat{\theta}\) son aquellos distintos de cero, para puntos \(\boldsymbol{x}_{n}\) correspondientes a valores de errores que sean mayores o iguales que \(\varepsilon\), esto es, por ejemplo \((y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0})\geq\varepsilon,~\lambda_{n}\neq0\).
Si \(y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}=\varepsilon\) (similar para \(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0}-y_{n}=\varepsilon\)), entonces
\[ (i)~\tilde{\lambda}_{n}\lambda_{n}=0\quad\text{o}\quad(ii)~(y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}-\varepsilon)(\xi_{n}-\tilde{\xi}_{n})-2\tilde{\xi}_{n}\xi_{n}=0 \]Si \(y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}>\varepsilon\) (similar para \(y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}<-\varepsilon\)), entonces \((i)~\tilde{\lambda}_{n}\lambda_{n}=0\). Además, basados en la tarea de optimización, seleccionando \(\boldsymbol{\theta}^{T}, \theta_{0}\) tales que \(y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}-\varepsilon\rightarrow0\) se tiene que
\[ (ii)~(y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\theta_{0}-\varepsilon)(\xi_{n}-\tilde{\xi}_{n})-2\tilde{\xi}_{n}\xi_{n}=0\Rightarrow\tilde{\xi}_{n}\xi_{n}=0. \]
Esto es
Derivando el Lagrangiano (6.9) tenemos los resultados
Para proceder a calcular los multiplicadores asociados a la tarea de optimización, consideraremos la
Representación dual de Walfe. En esta representación es considerado el término de sesgo \(\theta_{0}=0\). Además, consideraremos solo el uso de vectores de soportes, esto es valores asociados a \(\boldsymbol{\xi}_{n}=\tilde{\boldsymbol{\xi}}_{n}=0\), para proceder con la representación dual respectiva. Esta representación es obtenida a partir del Lagrangiano \(L(\boldsymbol{\theta}, \theta_{0}, \tilde{\xi}, \xi, \lambda, \mu)\).
Property 6.3 (Representación dual de Walfe)
Un problema de programación convexa es equivalente a
\[\begin{split} \max_{\lambda\geq0}&\quad L(\boldsymbol{\theta}, \boldsymbol{\lambda}),\\ \text{sujeto a}&\quad\frac{\partial}{\partial\boldsymbol{\theta}}L(\boldsymbol{\theta},\boldsymbol{\lambda})=\boldsymbol{0}. \end{split}\]La última ecuación garantiza que \(\boldsymbol{\theta}\) es un mínimo del Lagrangiano.
Considere el siguiente problema cuadrático:
\[\begin{split} \begin{align*} \text{minimizar:}&\quad\frac{1}{2}\boldsymbol{\theta}^{T}\boldsymbol{\theta},\\ \text{sujeto a:}&\quad A\boldsymbol{\theta}\geq b. \end{align*} \end{split}\]el cual admite la siguiente representación de Wolfe
\[\begin{split} \begin{align*} \text{minimizar:}&\quad\frac{1}{2}\boldsymbol{\theta}^{T}\boldsymbol{\theta}-\lambda^{T}(A\boldsymbol{\theta}-\boldsymbol{b}),\\ \text{sujeto a:}&\quad\theta-A^{T}\lambda=0. \end{align*} \end{split}\]Solucionando la tarea de optimización de Wolfe con respecto a \(\boldsymbol{\theta}\), podemos escribir el problema dual involucrando solo multiplicadores de Lagrange. De esta forma obtenemos otro problema cuadrático, pero más simple
\[\begin{split} \begin{align*} \max_{\lambda}&\left\{\displaystyle{-\frac{1}{2}\boldsymbol{\lambda}^{T}AA^{T}\boldsymbol{\lambda}+\boldsymbol{\lambda}^{T}\boldsymbol{b}}\right\}\\ \text{sujeto a:}&\quad\lambda\geq0. \end{align*} \end{split}\]
Nótese en la propiedad anterior que, \(\partial_{\boldsymbol{\theta}}(\frac{1}{2}\boldsymbol{\theta}^{T}\boldsymbol{\theta}-\lambda^{T}(A\boldsymbol{\theta}-\boldsymbol{b}))=\boldsymbol{\theta}-A^{T}\lambda\). Consideremos ahora la representación dual de Wolfe asociada a la tarea de optimización (6.9). Con este fin, consideremos \(A\boldsymbol{\theta}=\boldsymbol{\theta}\boldsymbol{x_{n}}+\theta_{0}\) y \(b=y_{n}-\varepsilon\), con \(\tilde{\xi}_{n}, \xi_{n}=0\), con base en el estimador obtenido para \(\hat{\boldsymbol{\theta}}\), la tarea de optimización se convierte en la siguiente representación dual de Walfe
El primer producto interior es reemplazado por \(\kappa(\boldsymbol{x}_{n}, \boldsymbol{x}_{m})\) vía kernel trick. Nótese que la primera restricción proviene de la igualdad \(C-\tilde{\lambda}-\tilde{\mu}_{n}=0\), con la cual se tiene que
\[ 0\leq\tilde{\lambda}_{n}\leq\tilde{\lambda}_{n}+\tilde{\mu}_{n}\leq C\Rightarrow 0\leq\tilde{\lambda}_{n}\leq C, \]análogamente, \(0\leq\lambda_{n}\leq C,\quad n=1,2,\dots,N.\)
El primer término proviene la siguiente igualdad obtenida a partir del Lagrangiano, el segundo resulta de factorizar los términos que incluyen los autovalores, con \(\xi_{n}=\tilde{\xi}_{n}=0\) (
verifíquelo) (vectores de soporte)
Observación
La belleza de la forma de representación dual radica en que involucra los vectores de observación en forma de operaciones de producto interno. Así, cuando se resuelve la tarea en un
RKHS, (6.11) se convierte en
Las condiciones KKT transmiten información importante. Los multiplicadores de Lagrange, \(\tilde{\lambda}_{n},\lambda_{n}\), para puntos que obtienen un error menor que \(\varepsilon\), es decir,
Por lo tanto, los multiplicadores de Lagrange son distintos de cero solo para puntos que obtienen un error igual a \(\varepsilon~(\tilde{\xi}_{n}, \xi_{n} = 0)\) o valores más grandes (\(\tilde{\xi}_{n}, \xi_{n}>0\)) (vectores de soporte).
Debido a (6.10), ya sea \(\tilde{\xi}_{n}\) o \(\xi_{n}\) pueden ser distintos de cero, pero no ambos. Esto también se aplica a los multiplicadores de Lagrange correspondientes.
6.8. Regresión Kernel Ridge#
En esta sección abordaremos la regresión kernel ridge vía su representación dual. La regresión ridge en su representación primal puede ser proyectada como:
(6.12)#\[\begin{split} \begin{align*} \text{minimizar con respecto a}\quad\boldsymbol{\theta}, \boldsymbol{\xi}:&\quad J(\boldsymbol{\theta}, \boldsymbol{\xi})=\sum_{n=1}^{N}\xi_{n}^{2}+C\|\boldsymbol{\theta}\|^{2}\\ \text{sujeto a}:&\quad y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}=\boldsymbol{\xi}_{n},\quad n=1,2,\dots,N, \end{align*} \end{split}\]con el siguiente Lagrangiano
\[ L(\boldsymbol{\theta}, \boldsymbol{\xi}, \lambda)=\sum_{n=1}^{N}\xi_{n}^{2}+C\|\boldsymbol{\theta}\|^{2}+\sum_{n=1}^{N}\lambda_{n}(y_{n}-\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}-\xi_{n}),\quad n=1,2,\dots,N. \]
Calculando las derivadas parciales \(\partial_{\boldsymbol{\theta},\xi_{n}}=0,\, n=1,2,\dots,N\) se tiene que
Para obtener los multiplicadores de Lagrange, consideramos la siguiente formulación dual, obtenida al reemplazar los estimadores \(\hat{\boldsymbol{\theta}}\) y \(\xi_{n}\) en la tarea de optimización (6.12)
La representación dual entrega la siguiente formulación
\[ \text{minimizar respecto a}~\lambda:\quad\sum_{n=1}^{N}\lambda_{n}y_{n}-\frac{1}{4C}\sum_{n=1}^{N}\sum_{m=1}^{N}\lambda_{n}\lambda_{m}\kappa(\boldsymbol{x}_{n}, \boldsymbol{x}_{m})-\frac{1}{4}\sum_{n=1}^{N}\lambda_{n}^{2}, \]aquí \(\boldsymbol{x}_{n}^{T}\boldsymbol{x}_{m}\) fue reemplazado por \(\kappa(\boldsymbol{x}_{n}, \boldsymbol{x}_{m})\), de acuerdo al kernel trick.
Diferenciando con respecto a \(\lambda\) obtenemos:
Dado que \(\displaystyle{\boldsymbol{\hat{\theta}}=\frac{1}{2C}\sum_{n=1}^{N}\lambda_{n}\boldsymbol{x}_{n}}\), usando kernel trick se tiene que
\[ \hat{y}(\boldsymbol{x})=\langle\boldsymbol{\hat{\theta}}, \kappa(\cdot,\boldsymbol{x})\rangle=\left\langle\frac{1}{2C}\sum_{n=1}^{N}2C(\kappa(\cdot, \boldsymbol{x}_{n})+C)^{-1}y_{n}, \kappa(\cdot, \boldsymbol{x}_{n})\right\rangle=\boldsymbol{y}^{T}(K+CI)^{-1}\kappa(\boldsymbol{x}). \]Nótese que en este caso no fue necesario el supuesto de invertibilidad para la matriz \(K\).
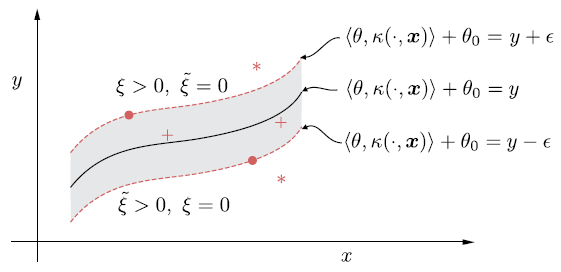
Fig. 6.6 Tubo alrededor de la curva de regresión no lineal. Los puntos fuera del tubo (denotados por estrellas) tienen o bien \(\tilde{\xi} > 0\) y \(\xi = 0\) o \(\xi > 0\) y \(\tilde{\xi} = 0\). El resto de los puntos tienen \(\tilde{\xi} = \xi = 0\) (SV). Los puntos que están dentro del tubo corresponden a multiplicadores de Lagrange iguales a cero.#
6.9. Máquinas de vectores de soporte#
Antes de abordar el modelo de clasificación, máquinas de vectores de soporte (SVM) revisemos la definición de un clasificador
Definition 6.4
Un clasificador, es una función definida como
donde para cada clase \(\omega\), se define su función discriminante \(f_{\omega}\). El grado de pertenencia del valor \(x\) a la clase \(\omega\) es \(f_{\omega}(x)\). Ademas \(\omega(x)\) es la clase a la que el objeto \(x\) pertenece en mayor grado.
Cuando en un método de clasificación Bayesiana desconocemos estadísticos subyacentes, una alternativa es usar técnicas de aprendizaje discriminante, y adoptar una función discriminante \(f\), que efectúa la clasificación correspondiente y trata de optimizarla, como se minimiza la función de pérdida empírica
Para una tarea de clasificación binaria, la función de pérdida \((0, 1)\), definida de la siguiente forma, puede ser utilizada en la tarea de optimización
El principal problema de esta función de pérdida es que su optimización resulta ser una tarea compleja, debido a que es discontinua. Se han utilizado alternativas para esta función de pérdida, con el fin de solventar este problema. En esta sección centraremos nuestra atención en la función de pérdida hinge definida como
Esto es, si el signo del producto entre el label real \((y)\) y el predicho por la función discriminante \((f(x))\) es positivo y mayor que un umbral definido por el usuario, \(\rho\geq0\), la función de pérdida es cero. En caso contrario, la función de pérdida exhibe un crecimiento lineal.
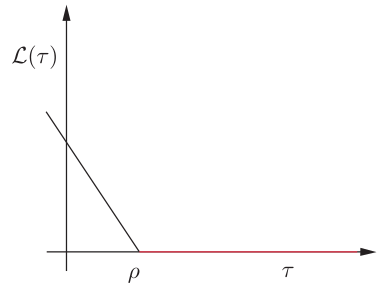
Fig. 6.7 Función de pérdida hinge, para la tarea de clasificación, \(\tau = y\boldsymbol{\theta}^{T}\boldsymbol{x}\).#
Consideraremos en esta sección, la función discriminante en el espacio RKHS
\[ f(\boldsymbol{x})=\theta_{0}+\langle\boldsymbol{\theta}, \phi(\boldsymbol{x})\rangle, \]donde \(\phi(\boldsymbol{x})\) es el mapeo de características. Proyectamos la tarea de optimización como un problema lineal en el espacio de inputs, \(\mathbb{R}^{l}\), y al final la información del kernel será implantada usando el kernel trick.
La tarea de diseñar un clasificador lineal, ahora es equivalente a minimizar la función de costo
Alternativamente, empleando variables de relajación (slack) y siguiendo un razonamiento similar a la regresión de vectores de soporte (SVR), minimizar (6.14) es equivalente a:
La constante \(C\) se encarga de maximizar el margen mientras que se evita el sobreajuste. Adoptaremos de ahora en adelante \(\rho=1\) sin pérdida de generalidad. Nótese que \(y_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0})\geq1\) si \(\xi_{n}=0\), en este caso el margen de error sería nulo. Por otro lado, un margen de error es cometido si \(y_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0})\leq 1\), correspondiente a \(\xi_{n}>0\). Por lo tanto, nuestro objetivo para la tarea de optimización es, encontrar \(\boldsymbol{\theta}, \theta_{0}, \xi_{n}\) óptimos, tales que \(\xi_{n}\) sea tan pequeño como sea posible.
6.10. Clases linealmente separables: Clasificador de máximo margen#
Asumiendo que las clases son linealmente separables, hay un número infinito de clasificadores que solucionan la tarea exactamente, sin error, en el conjunto de entrenamiento. Se puede ver que de estos infinitos hiperplanos que solucionan la tarea, podemos identificar un subconjunto tal que
\[ y_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0})\geq 1,\quad n=1,2,\dots,N, \]el cual garantiza que \(\xi_{n}=0,~n=1,2,\dots,N\). Por lo tanto, para clases linealmente separables, la tarea de optimización previa es equivalente a
(6.15)#\[\begin{split} \begin{align*} \text{minimizar con respecto a}~\theta:&\quad\frac{1}{2}\|\boldsymbol{\theta}\|^{2}\\ \text{sujeto a:}&\quad y_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0})\geq 1,\quad n=1,2,\dots,N. \end{align*} \end{split}\]
En otras palabras, de este conjunto infinito de clasificadores lineales (ver Fig. 6.8), los cuales solucionan la tarea de optimización, y clasifican correctamente todos los patrones, se selecciona aquel que tiene mínima norma.
Veremos mas adelante que, la norma \(\|\boldsymbol{\theta}\|\) está directamente relacionada con el margen formado por el respectivo clasificador. Cada hiperplano en el espacio está descrito por la ecuación
\[ f(\boldsymbol{x})=\boldsymbol{\theta}^{T}\boldsymbol{x}+\theta_{0}=0. \]
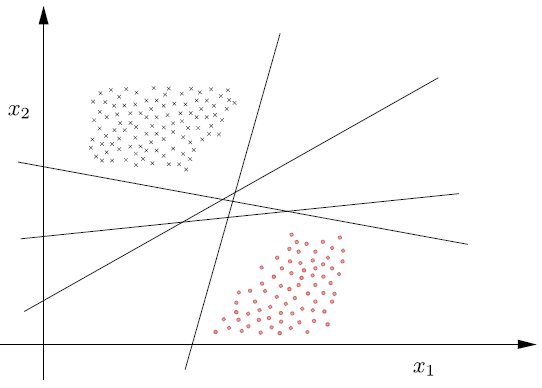
Fig. 6.8 Número infinito de clasificadores lineales que pueden clasificar correctamente todos los patrones de una clase linealmente separable.#
De la geometría analítica sabemos que la dirección en espacio es controlada por \(\boldsymbol{\theta}\) y su posición por \(\theta_{0}\). Además, de todos los hiperplanos que solucionan la tarea de optimización y tienen la misma dirección (i.e. comparten \(\boldsymbol{\theta}\)), seleccionamos \(\theta_{0}\) tal que, el hiperplano queda dentro de dos clases, de modo que su distancia a los puntos más cercanos es siempre la misma para las dos clases.
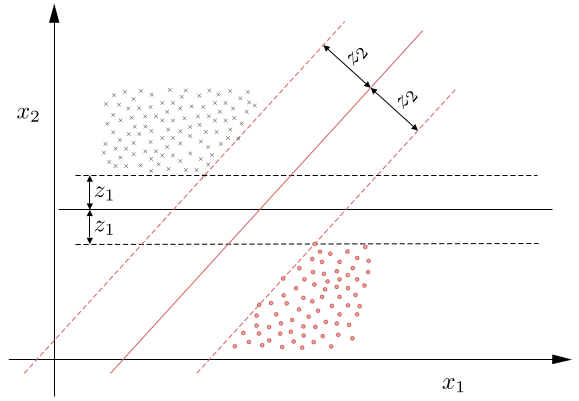
Fig. 6.9 Las líneas punteadas, \(\boldsymbol{\theta}^{T}\boldsymbol{x} + \theta_{0} =±1\), que pasan por los puntos más cercanos, son paralelas al clasificador respectivo y definen el margen (ancho de banda) \(2/\|\boldsymbol{\theta}\|\).#
De la geometría básica sabemos que la distancia de un punto \(\boldsymbol{x}\) al hiperplano está dada por
\[ z=\frac{|\boldsymbol{\theta}^{T}\boldsymbol{x}+\theta_{0}|}{\|\boldsymbol{\theta}\|} \]la cual es claramente cero cuando \(\boldsymbol{x}\) está dentro del hiperplano \(\boldsymbol{\theta}^{T}\boldsymbol{x}+\theta_{0}=0\). Donde los parámetros \(\boldsymbol{\theta}\) y \(\theta_{0}\) pueden ser escalados apropiadamente, por ejemplo, usando un factor, digamos, \(a\), sin afectar la geometría del plano.
De esta forma, podemos hacer la distancia del punto más cercano, de los puntos más cercanos entre las dos clases al hiperplano, igual a \(1/\|\boldsymbol{\theta}\|\), donde \(|\boldsymbol{\theta}^{T}\boldsymbol{x}+\theta_{0}|=1\).
Equivalentemente, el escalamiento garantiza que: \(f(\boldsymbol{x})=\pm 1\), si \(\boldsymbol{x}\) es el punto más cercano al hiperplano, y dependiendo de si el punto \(x\) pertenece a \(\omega_{1} (+1)\) o \(\omega_{2} (-1)\). Los dos hiperplanos se pueden visualizar en la Fig. 6.9 \((f(\boldsymbol{x})=\pm1)\). Estos dos hiperplanos definen el margen correspondiente de longitud \(2/\|\boldsymbol{\theta}\|\) para cada iteración.
Cualquier clasificador construido de la forma anterior, soluciona la tarea de optimización, y además satisface las siguientes propiedades:
Tiene un margen de longitud igual a: \(\displaystyle{1/\|\boldsymbol{\theta}\|+1/\|\boldsymbol{\theta}}\|\)
Además:
\[ \boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0}\geq 1,~\boldsymbol{x}_{n}\in\omega_{1}~\text{y}~\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0}\leq-1,~\boldsymbol{x}_{n}\in\omega_{2} \]Por lo tanto la tarea de optimización (6.15) calcula el clasificador lineal que maximiza el margen sujeto a las respectivas restricciones.
Solución
Siguiendo pasos similares a SVR, la solución esta dada por, combinación lineal de un subconjunto de muestras de entrenamiento, esto es:
\[ \hat{\boldsymbol{\theta}}=\sum_{n=1}^{N_{s}}\lambda_{n}y_{n}\boldsymbol{x}_{n}, \]donde \(N_{s}\) es el número de multiplicadores de Lagrange distintos de cero.
Multiplicadores de Lagrange asociados a los puntos más cercanos al clasificador, esto es, puntos que satisfacen la restricción con igualdad \((y_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0})=1)\), son distintos de cero. Estos son conocidos como vectores de soporte. Multiplicadores de Lagrange correspondientes a puntos tales que \((y_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0})>1)\), son iguales a cero.
Para el caso mas general, en el espacio RKHS, tenemos que:
\[ \hat{\theta}(\cdot)=\sum_{n=1}^{N_{s}}\lambda_{n}y_{n}\kappa(\cdot, \boldsymbol{x}_{n}), \]estimación la cual entrega la siguiente regla de predicción. Dado un valor desconocido \(\boldsymbol{x}\), su clase es predicha de acuerdo al signo de:
\[ \hat{y}(\boldsymbol{x})=\sum_{n=1}^{N_{s}}\lambda_{n}y_{n}\kappa(\boldsymbol{x}, \boldsymbol{x}_{n})+\hat{\theta}_{0}:\quad\text{Predicción SVM}, \]donde \(\hat{\theta}_{0}\) es obtenido solucionando todas las restricciones con \(\lambda_{n}\neq0\), correspondientes a:
\[ y_{n}(\hat{\boldsymbol{\theta}}^{T}\boldsymbol{x}_{n}+\hat{\theta}_{0})-1=0,\quad n=1,2,\dots,N_{s}, \]la cual para el caso RKHS se convierte en:
(6.16)#\[ y_{n}\left(\sum_{m=1}^{N_{s}}\lambda_{m}y_{m}\kappa(\boldsymbol{x}_{m}, \boldsymbol{x}_{n})+\hat{\theta}_{0}\right)-1=0,\quad n=1,2,\dots,N_{s}, \]donde \(\hat{\theta}_{0}\) es obtenido por medio del promedio entre las soluciones de (6.16). Aunque la solución es única, los correspondientes multiplicadores \(\lambda_{m}\) pueden no ser únicos.
Finalmente el número de vectores de soporte está relacionado con la capacidad de generalización del clasificador. Entre mas pequeño es el número de vectores de soporte, mejor será la generalización esperada (ver [Koutroumbas and Theodoridis, 2008, 佐土原健, 2001]).
Tarea de optimización
Procedemos de forma similar a SVR. El Lagrangiano asociado a la tarea de clasificación está dado por:
Calculando las derivadas parciales \(\partial_{\boldsymbol{\theta}}=0\) y \(\partial_{\theta_{0}}=0\), se tienen las condiciones siguientes
Los multiplicadores son obtenidos por medio de la representación dual de (6.17) en el Lagrangiano
Con base en lo anterior, la siguiente es la representación dual de la tarea de optimización
Para el caso en que la tarea de optimización original es mapeada en el espacio RKHS, la función de costo viene dada por
De acuerdo con la restricción: \(\lambda_{n}(y_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0})-1)=0,~n=1,2,\dots,N\), si \(\lambda_{n}\neq0\), entonces necesariamente \(y_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0})=1\). Estos son los puntos mas cercanos, desde cada clase al clasificador (distancia \(1/\|\boldsymbol{\theta}\|\)).
Estos puntos caen en cualquiera de los hiperplanos formando el borde del margen. Estos puntos se conocen como los vectores de soporte y las respectivas restricciones son conocidas como restricciones activas. El resto de puntos asociados con \(y_{n}(\boldsymbol{\theta}^{T}\boldsymbol{x}_{n}+\theta_{0})>1\), los cuales quedan por fuera del margen corresponden a \(\lambda_{n}=0\), y las restricciones asociadas son conocidas como las restricciones inactivas.
6.11. Clases no separables#
Centraremos ahora nuestra atención en un caso mas realista en el que las clases se superponen. En este caso no existe un clasificador lineal que pueda clasificar correctamente todos los puntos, algunos errores de clasificación pueden ocurrir. Existen tres tipos de puntos mal clasificados.
Puntos que se encuentran en la frontera o fuera del margen y en el lado correcto del clasificador, esto es
\[ y_{n}f(\boldsymbol{x}_{n})\geq1. \]Estos puntos no cometen margen de error, esto es: \( \xi_{n}=0.\)
Puntos que se encuentran en el lado correcto del clasificador, pero se encuentran dentro del margen, esto es
\[ 0<y_{n}f(\boldsymbol{x}_{n})<1. \]Estos puntos cometen un margen de error, y se tiene que: \(0<\xi_{n}<1\).
Puntos que se encuentran en el lugar equivocado del clasificador, esto es,
\[ y_{n}f(\boldsymbol{x}_{n})\leq0. \]Estos puntos cometen un error, y se tiene que: \(\xi_{n}\geq1.\)
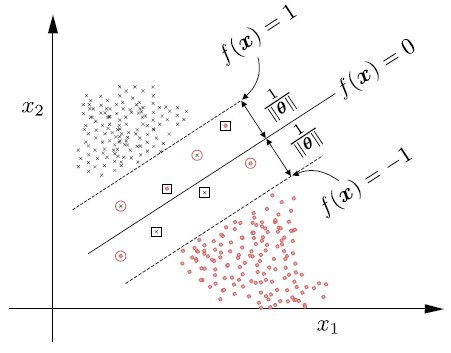
Fig. 6.10 (1) puntos fuera o en los límites del margen y se clasifican correctamente (\(\xi_{n} = 0\)); (2) puntos dentro del margen y clasificados correctamente (\(0 < \xi_{n} < 1\)), denotados por círculos; y (3) puntos mal clasificados, denotados por un cuadrado \((\xi_{n}\geq 1\)).#
Nuestro objetivo es estimar el hiperplano clasificador que maximiza el margen y al mismo tiempo mantiene el número de errores (incluyendo el margen del error) tan pequeño como sea posible.
Solución
Una vez mas la solución está dada por una combinación lineal de un subconjunto de puntos de entrenamiento
\[ \boldsymbol{\hat{\theta}}=\sum_{n=1}^{N_{s}}\lambda_{n}y_{n}\boldsymbol{x}_{n}, \]donde \(\lambda_{n},~n=1,2,\dots,N\), son los multiplicadores de Lagrange asociados con los vectores de soporte. Los puntos \(\boldsymbol{x}_{n}\) pueden satisfacer cualquiera de los tres casos para tipos de datos de entrenamiento.
Tarea de optimización
El Lagrangiano asociado con la tarea de optimización está dado por:
Entonces
El problema dual entonces es proyectado como:
Cuando se trabaja en un espacio RKHS, la función de coste se convierte en
\[ \sum_{n=1}^{N}\lambda_{n}-\frac{1}{2}\sum_{n=1}^{N}\sum_{m=1}^{N}\lambda_{n}\lambda_{m}y_{n}y_{m}\kappa(\boldsymbol{x}_{n}, \boldsymbol{x}_{m}) \]Obsérvese que la única diferencia con respecto a su contraparte linealmente separable es la existencia de \(C\) en las restricciones de desigualdad para \(\lambda_{n}\).
A partir de (6.18) concluimos que para todos los puntos fuera del margen, y en el lado correcto del clasificador, que corresponden a \(\xi_{n} = 0\), tenemos
\[ y_{n}(\boldsymbol{\theta}\boldsymbol{x}_{n}+\theta_{0})>1, \]por lo tanto, \(\lambda_{n}=0\). Esto es, estos puntos no participan en la formación de la solución \(\hat{\boldsymbol{\theta}}\) en (6.18).
Tenemos \(\lambda_{n}\neq0\) sólo para los puntos en los hiperplanos de la frontera, dentro o fuera del margen, pero en el lado equivocado del clasificador. Estos son los vectores de soporte.
Para los puntos que se encuentran dentro del margen o fuera pero en el lado equivocado, \(\xi_{n}>0\); por lo tanto, a partir de (6.18) se tiene que \(\mu_{n} = 0\) y además \(\lambda_{n}=C\).
Los vectores de soporte que se encuentran en los hiperplanos de la frontera del margen satisfacen \(\xi_{n} = 0\) y, por tanto, \(\mu_{n}\) puede ser distinto de cero, lo que lleva a \(0\leq\lambda_{n}\leq C\).
6.12. Ejercicios para el estudiante#
Demuestre que el kernel reproductor \(\kappa(\cdot, \cdot)\) es definido positivo.
Demuestre que si \(\kappa(\cdot, \cdot)\) es el kernel reproductor en un espacio de Hilbert(RKHS) \(\mathbb{H}\), entonces
Demuestre la desigualdad de Cauchy–Schwarz para kernels, es decir,
Demuestre que si
\[ \kappa_i (\cdot, \cdot) : X \times X \to \mathbb{R}, \quad i = 1,2, \]son kernels, entonces:
\(\kappa(x, y) = \kappa_1(x, y) + \kappa_2(x, y)\) también es un kernel;
\(a\kappa(x, y)\), con \(a > 0\), también es un kernel;
\(\kappa(x, y) = \kappa_1(x, y) \kappa_2(x, y)\) también es un kernel.
Demuestre la ecuación (6.4)
Demuestre que la solución para los parámetros \(\hat{\theta}\) en la regresión de ridge con kernel, cuando se incluye un término de sesgo \(b\), está dada por
\[\begin{split} \begin{bmatrix} \theta \\ b \end{bmatrix} = \begin{bmatrix} K + C I & 1 \\ 1^T K & N \end{bmatrix}^{-1} \begin{bmatrix} y \\ y^T 1 \end{bmatrix}, \end{split}\]donde \(1\) es el vector cuyas entradas son todas iguales a uno. Asuma la invertibilidad de la matriz de kernel.
6.13. Aplicación#
6.14. Modelos lineales y características no lineales#
Como se ha visto antes, los modelos lineales pueden ser bastante limitados en espacios de baja dimensión, ya que las líneas y los hiperplanos tienen una flexibilidad limitada. Una forma de hacer que un modelo lineal sea mas flexible es añadiendo más características, por ejemplo, añadiendo interacciones o polinomios de las características de entrada. Veamos el dataset sintético utilizado en feature importance
import warnings
warnings.filterwarnings('ignore')
from sklearn.datasets import make_blobs
import mglearn
import matplotlib.pyplot as plt
import numpy as np
El vector de labels y, está compuesto por las clases 0, 1, 2, 3. Convertimos el problema, en uno binario, usando la clase residual modulo 2, mediante:
y = y % 2
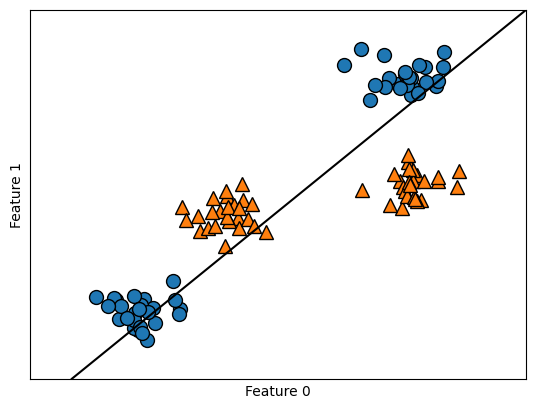
X, y = make_blobs(centers=4, random_state=8)
y = y % 2
mglearn.discrete_scatter(X[:, 0], X[:, 1], y)
plt.xlabel("Feature 0")
plt.ylabel("Feature 1");
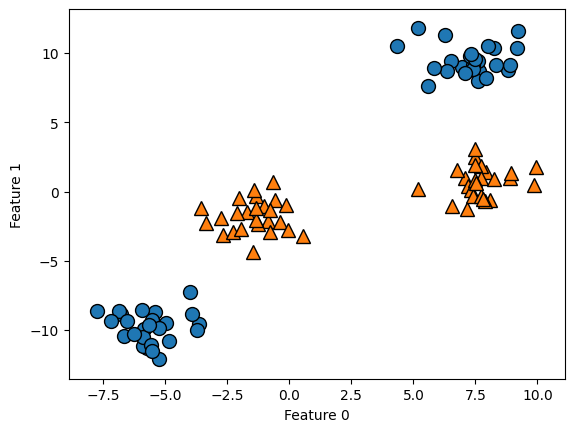
Un `modelo lineal de clasificación sólo puede separar los puntos mediante una línea***, por lo tanto, no podrá hacer un buen trabajo en este conjunto de datos
from sklearn.svm import LinearSVC
linear_svm = LinearSVC().fit(X, y)
mglearn.plots.plot_2d_separator(linear_svm, X)
mglearn.discrete_scatter(X[:, 0], X[:, 1], y)
plt.xlabel("Feature 0")
plt.ylabel("Feature 1");
Ahora vamos a ampliar el conjunto de características de entrada, digamos que añadiendo también feature1 2, el cuadrado de la segunda característica, como una nueva característica. En lugar de representar cada punto de datos como un punto bidimensional, (
feature0,feature1), ahora lo representamos como un punto tridimensional, (feature0,feature1,feature1 ** 2). Esta nueva representación se ilustra en el siguiente grafico de dispersión tridimensional
X_new = np.hstack([X, X[:, 1:] ** 2])
Nótese que al nuevo array
X_newse le agregó una tercera columna utilizando la segunda columna deX,X[:, 1:]
X_new[:5]
array([[-1.72161036, -1.48033142, 2.19138111],
[-3.6573384 , -9.5482383 , 91.16885455],
[ 7.0778163 , 0.99508772, 0.99019957],
[-1.36579859, -0.3148625 , 0.09913839],
[-2.66521206, -3.12591651, 9.77135405]])
from mpl_toolkits.mplot3d import Axes3D, axes3d
Visualizamos los datos en 3D y trazamos primero todos los puntos con
y == 0, luego todos cony == 1. Si está interesado en conocer mas sobre los argumentos que puede utilizar en la funciónscatter(ver matplotlib.pyplot.scatter)
figure = plt.figure()
ax = Axes3D(figure, elev=-152, azim=-26) #elev, azim: vertical and horizontal angle respectivly
ax = figure.add_subplot(projection='3d')
mask = y == 0 # booleano para etiquetado
ax.scatter(X_new[mask, 0], X_new[mask, 1], X_new[mask, 2], c='b', cmap=mglearn.cm2, s=60) # s=60: points size; cmap=mglearn.cm2:color palette
ax.scatter(X_new[~mask, 0], X_new[~mask, 1], X_new[~mask, 2], c='r', marker='^', cmap=mglearn.cm2, s=60)
ax.set_xlabel("feature0")
ax.set_ylabel("feature1")
ax.set_zlabel("feature1 ** 2");
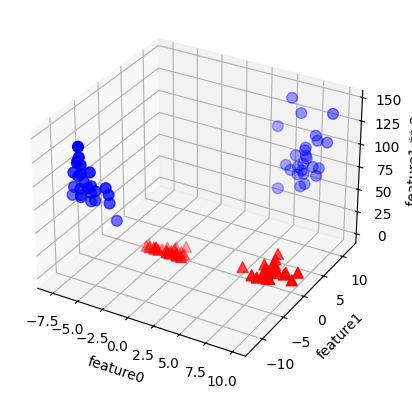
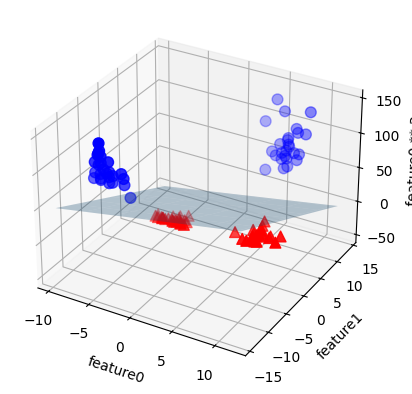
En esta nueva representación de los datos, ahora sí es posible separar las dos clases mediante un modelo lineal, un plano en tres dimensiones. Podemos confirmarlo ajustando un modelo lineal a los datos aumentados
linear_svm_3d = LinearSVC().fit(X_new, y)
coef, intercept = linear_svm_3d.coef_.ravel(), linear_svm_3d.intercept_
Puede imprimir los coeficientes e intercepto (
coef, intercept) del plano de la forma \(c_{0}x+c_{1}y+c_{2}z+\text{intercept}\), que separa las dos clases. Nótese que en este caso se está realizando un mapeo de características a un espacio de Hilbert, de mayor dimensión, donde se linealiza nuestro problema de clasificación.Aquí
rstride, cstrideson utilizados para realizar divisiones uniformes en el planoXY,elevyazimson ángulos de rotación en grados que giran la imagen enXYyZrespectivamente, . Para mas información acerca de como usarplot_surface(ver 3D surface (colormap)). Es tarea del estudiante profundizar en el uso de cada parámetro.
figure = plt.figure()
ax = Axes3D(figure, elev=-152, azim=-26)
ax = figure.add_subplot(projection='3d')
xx = np.linspace(X_new[:, 0].min() - 2, X_new[:, 0].max() + 2, 50)
yy = np.linspace(X_new[:, 1].min() - 2, X_new[:, 1].max() + 2, 50)
XX, YY = np.meshgrid(xx, yy)
ZZ = (coef[0] * XX + coef[1] * YY + intercept) / -coef[2] #ecuación del plano
ax.plot_surface(XX, YY, ZZ, rstride=8, cstride=8, alpha=0.3) #rstride/cstride: control row/column stride
ax.scatter(X_new[mask, 0], X_new[mask, 1], X_new[mask, 2], c='b', cmap=mglearn.cm2, s=60)
ax.scatter(X_new[~mask, 0], X_new[~mask, 1], X_new[~mask, 2], c='r', marker='^', cmap=mglearn.cm2, s=60)
ax.set_xlabel("feature0")
ax.set_ylabel("feature1")
ax.set_zlabel("feature0 ** 2");
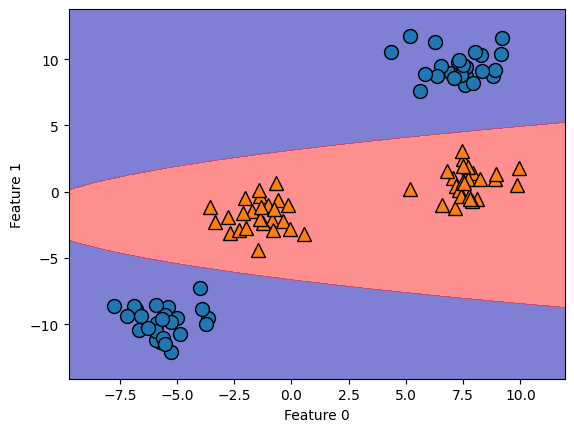
Como función de las características originales, el modelo SVM lineal ya no es lineal. No es una línea, sino más bien una elipse, como se puede ver en el gráfico creado aquí. Para dibujar la función de decisión utilizamos la clase
decision_functiondeLinearSVC().La función ravel(), devuelve un array 1-D que contiene los elementos de la entrada. Se hace una copia sólo si se necesita. Para conocer más métodos que pueden ser utilizados a partir de la clase SVC (ver sklearn.svm.SVC). Aquí levels indica niveles específicos en los que las curvas de nivel serán dibujadas, los valores deben estar en orden creciente. Para mas información acerca de dibujos de contorno (ver matplotlib.pyplot.contourf).
ZZ = YY ** 2
dec = linear_svm_3d.decision_function(np.c_[XX.ravel(), YY.ravel(), ZZ.ravel()])
plt.contourf(XX, YY, dec.reshape(XX.shape), levels=[dec.min(), 0, dec.max()], cmap=mglearn.cm2, alpha=0.5)
mglearn.discrete_scatter(X[:, 0], X[:, 1], y)
plt.xlabel("Feature 0")
plt.ylabel("Feature 1");
6.15. El Kernel Trick#
Durante el entrenamiento, SVM aprende cuan importante son cada uno de los puntos de datos de entrenamiento para representar el límite de decisión entre las dos clases. Recuerde que, sólo un subconjunto de los puntos de entrenamiento es importante para definir la frontera de decisión, los que se encuentran en la frontera entre las clases (vectores de soporte).
Para hacer una predicción de un nuevo punto, se mide la distancia a cada uno de los vectores de soporte. Se toma una decisión de clasificación basada en las distancias a los vectores de soporte y en la importancia de los vectores de soporte, aprendida durante el entrenamiento (almacenado en el atributo
dual_coef_deSVC). La distancia entre los puntos de datos se mide, por ejemplo, mediante elkernel Gaussiano:
Aquí, \(x_{1}\) y \(x_{2}\) son puntos de datos, \(\|x_{1} - x_{2}\|\) denota la distancia euclidiana, y \(\gamma\) es un parámetro que controla el ancho del kernel gaussiano. \(\gamma\)
=gammadefine un factor de escala general para la noción de distancia entre dos puntos de la SVM; esto, a su vez, define cómo un vector de apoyo da forma al límite de decisión en su vecindad cercana. La siguiente figura muestra el resultado del entrenamiento de una máquina de vectores de soporte en un conjunto de datos bidimensional de dos clases. El límite de decisión se muestra en negro, y los vectores de soporte son puntos más grandes con el contorno ancho. El siguiente código crea este gráfico entrenando una SVM en el conjunto de datos forge
import imp
from sklearn.svm import SVC
import mglearn
import matplotlib.pyplot as plt
from sklearn.model_selection import train_test_split
from sklearn.datasets import load_breast_cancer
import numpy as np
cancer = load_breast_cancer()
X, y = mglearn.tools.make_handcrafted_dataset()
svm = SVC(kernel='rbf', C=10, gamma=0.1).fit(X, y)
print("X.shape =", X.shape, "; y.shape", y.shape)
X.shape = (26, 2) ; y.shape (26,)
Dibujamos los vectores de soporte. Las etiquetas de clase de los vectores soporte vienen dadas por el signo de los coeficientes duales obtenidos en Python por medio de la función
dual_coef_
mglearn.plots.plot_2d_separator(svm, X, eps=.5)
mglearn.discrete_scatter(X[:, 0], X[:, 1], y)
sv = svm.support_vectors_
sv_labels = svm.dual_coef_.ravel() > 0
mglearn.discrete_scatter(sv[:, 0], sv[:, 1], sv_labels, s=15, markeredgewidth=3)
plt.xlabel("Feature 0")
plt.ylabel("Feature 1");
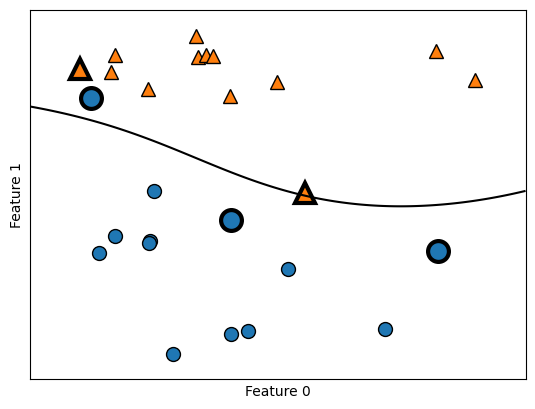
En este caso, SVM produce un límite muy suave y no lineal. Aquí ajustamos dos parámetros: el parámetro
Cy el parámetrogamma, que ahora discutiremos en detalle. Puede hacer uso de la validación cruzada y pipeline estudiados en la sección de evaluación de modelos.
6.16. Ajuste de los parámetros de SVM#
El parámetro gamma es el que se muestra en la fórmula dada en la sección anterior, que controla la anchura del kernel Gaussiano. Determina la escala de lo que significa que los puntos estén próximos entre sí. El parámetro C es un parámetro de regularización, similar al utilizado en los modelos lineales. Limita la importancia de cada punto (o más precisamente, su
dual_coef_). Veamos qué ocurre cuando variamos estos parámetros:
fig, axes = plt.subplots(3, 3, figsize=(15, 10))
for ax, C in zip(axes, [-1, 0, 3]):
for a, gamma in zip(ax, range(-1, 2)):
mglearn.plots.plot_svm(log_C=C, log_gamma=gamma, ax=a)
axes[0, 0].legend(["class 0", "class 1", "sv class 0", "sv class 1"], ncol=4, loc=(.9, 1.2))
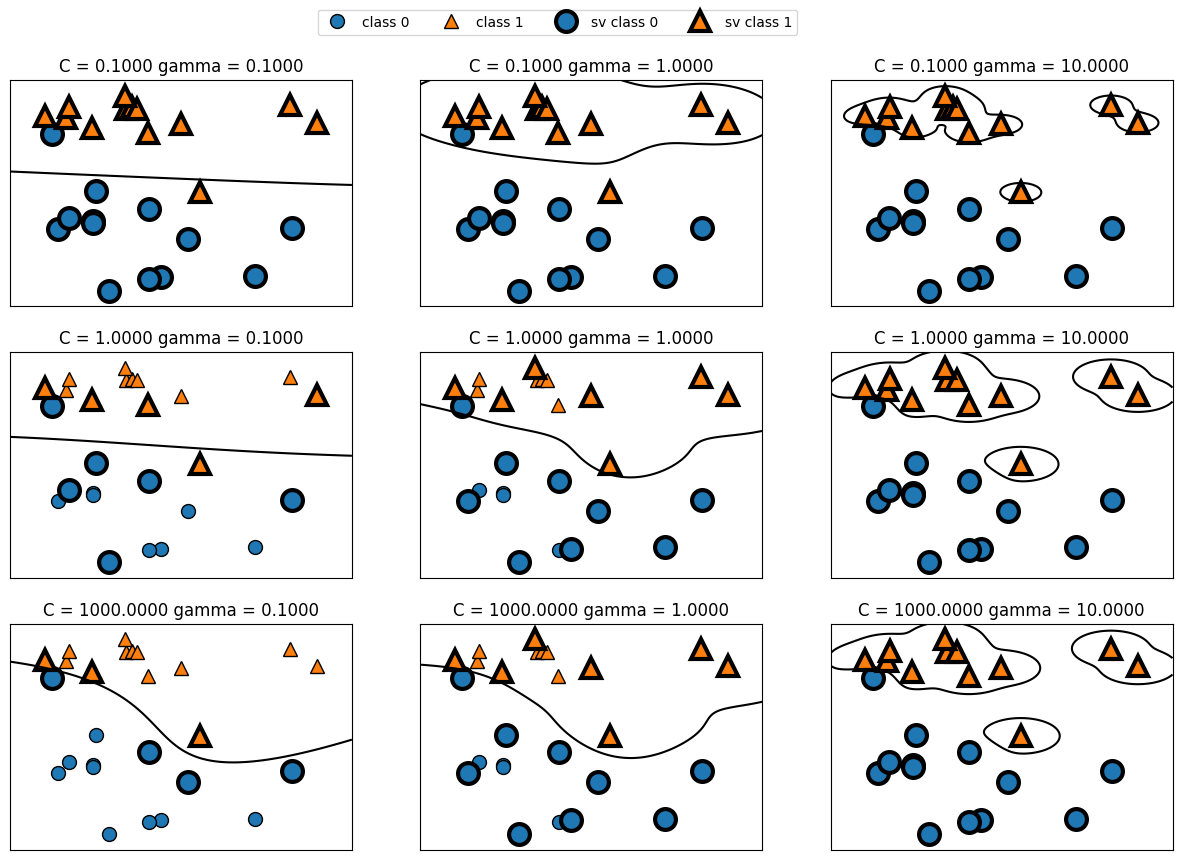
De izquierda a derecha, aumentamos el valor del parámetro gamma de 0.1 a 10. Un gamma pequeño significa un radio grande para el kernel gaussiano, lo que significa que muchos puntos se consideran cercanos. Esto se refleja en unos límites de decisión muy suaves a la izquierda, y límites que se centran más en puntos individuales más a la derecha. Un valor bajo de gamma significa que el límite de decisión variará lentamente, lo que produce un modelo de baja complejidad, mientras que un valor alto de gamma da lugar a un modelo más complejo.
De arriba a abajo, aumentamos el parámetro
Cde 0.1 a 1000. Al igual que con los modelos lineales, un valor deCpequeño corresponde a un modelo muy restringido, en el que cada punto de datos sólo puede tener una influencia muy limitada. Se puede ver que en la parte superior izquierda el límite de decisión parece casi lineal, y los puntos mal clasificados apenas influyen en la línea.Aumentar C, como se muestra en la parte inferior derecha, permite que estos puntos tengan una influencia en el modelo y hace que el límite de decisión se doble para clasificarlos correctamente. Apliquemos SVM de núcleo RBF al conjunto de datos
breast cancer. Por defecto,C=1ygamma=1/n_features. Queda como tarea para el estudiante hiperparametrizar cada uno de estos parámetros por medio del uso deGridSearchCVyPipeline.
X_train, X_test, y_train, y_test = train_test_split(cancer.data, cancer.target, random_state=0)
svc = SVC()
svc.fit(X_train, y_train)
print("Accuracy on training set: {:.2f}".format(svc.score(X_train, y_train)))
print("Accuracy on test set: {:.2f}".format(svc.score(X_test, y_test)))
Accuracy on training set: 0.90
Accuracy on test set: 0.94
Aunque las
SVMsuelen funcionar bastante bien, son muy sensibles a los ajustes de los parámetros y al escalado de los datos. En particular, requieren que todas las características varíen en una escala similar. Veamos los valores mínimos y máximos de cada característica, trazados en escala logarítmica
plt.plot(X_train.min(axis=0), 'o', label="min")
plt.plot(X_train.max(axis=0), '^', label="max")
plt.legend(loc=4)
plt.xlabel("Feature index")
plt.ylabel("Feature magnitude")
plt.yscale("log")
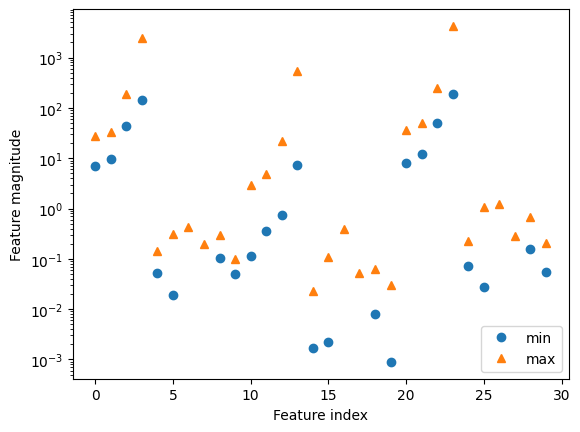
A partir de este gráfico podemos determinar que las características del conjunto de datos de cáncer de mama son de órdenes de magnitud completamente diferentes. Esto puede ser un problema para otros modelos (como los modelos lineales), pero tiene efectos devastadores para SVM con kernel. Examinemos algunas formas de resolver este problema.
6.17. Preprocesamiento de datos para SVM#
Una forma de resolver este problema es reescalar cada característica para que todas estén aproximadamente en la misma escala. Un método común de reescalado para SVMs con kernel consiste en escalar los datos de manera que todas las características estén entre 0 y 1. Veremos cómo hacer esto usando el método de preprocesamiento
MinMaxScaler, \(X_{\textsf{scaled}}=(X-X_{\textsf{min}})/(X_{\textsf{max}}-X_{\textsf{min}})\). Con el fin de comprender su funcionamiento, vamos a implementar el preprocesamiento “de forma manual”
Calculamos el valor mínimo por característica en el conjunto de entrenamiento. Dado que
X_traincontiene 30 columnas de características, el resultado va a ser un array de dimensión 30. Para obtenerlo usamosmin(axis=0), para que el mínimo sea buscado sobre las filas de cada columna.
X_train.shape
(426, 30)
min_on_training = X_train.min(axis=0)
min_on_training.shape
(30,)
Calculamos el vector de rangos para cada característica (max - min) en el conjunto de entrenamiento. El máximo sobre cada columna es calculado usando la función max(axis=0).
range_on_training = (X_train - min_on_training).max(axis=0)
range_on_training.shape
(30,)
Restamos con el mínimo, cada una de las características en X_train y después dividimos por el rango para cada característica resultante
X_train_scaled = (X_train - min_on_training) / range_on_training
print("Minimum for each feature\n{}".format(X_train_scaled.min(axis=0)))
Minimum for each feature
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0.]
print("Maximum for each feature\n {}".format(X_train_scaled.max(axis=0)))
Maximum for each feature
[1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1.]
Utilizamos la misma transformación en el conjunto de prueba, utilizando el mínimo y el rango del conjunto de entrenamiento
X_test_scaled = (X_test - min_on_training) / range_on_training
Utilizando ahora los datos transformados, entrenamos el modelo SVC() y verificamos valores de
accuracy
svc = SVC()
svc.fit(X_train_scaled, y_train)
print("Accuracy on training set: {:.3f}".format(svc.score(X_train_scaled, y_train)))
print("Accuracy on test set: {:.3f}".format(svc.score(X_test_scaled, y_test)))
Accuracy on training set: 0.984
Accuracy on test set: 0.972
Escalar los datos supuso una gran diferencia. Ahora estamos en un régimen de overfitting donde el rendimiento del conjunto de entrenamiento es ligeramente mayor que el de prueba, pero menos cercano al 100% de
accuracy. A partir de aquí, podemos intentar disminuirCogammapara ajustar un modelo regularizado. Por ejemplo:
svc_C01 = SVC(C=0.1)
svc_C01.fit(X_train_scaled, y_train)
print("Accuracy on training set: {:.3f}".format(svc_C01.score(X_train_scaled, y_train)))
print("Accuracy on test set: {:.3f}".format(svc_C01.score(X_test_scaled, y_test)))
Accuracy on training set: 0.948
Accuracy on test set: 0.958
Nótese que sucede cuando seguimos disminuyendo el valor de \(C\)
svc_C001 = SVC(C=0.01)
svc_C001.fit(X_train_scaled, y_train)
print("Accuracy on training set: {:.3f}".format(svc_C001.score(X_train_scaled, y_train)))
print("Accuracy on test set: {:.3f}".format(svc_C001.score(X_test_scaled, y_test)))
Accuracy on training set: 0.643
Accuracy on test set: 0.636
Si usamos un parámetro de regularización C demasiado extremos, podemos caer nuevamente en un mayor overfitting, o en un modelo demasiado simple, que entrega valores de
accuracybastantes bajos para los datos de entrenamiento y prueba, esto es, el modelo no será capaz de generalizarse correctamente, underfitting.
svc_C100 = SVC(C=100)
svc_C100.fit(X_train_scaled, y_train)
print("Accuracy on training set: {:.3f}".format(svc_C100.score(X_train_scaled, y_train)))
print("Accuracy on test set: {:.3f}".format(svc_C100.score(X_test_scaled, y_test)))
Accuracy on training set: 1.000
Accuracy on test set: 0.965
Puntos fuertes, puntos débiles y parámetros
Las máquinas de vectores de soporte kernelizadas son modelos potentes y funcionan bien en una variedad de conjuntos de datos. Las SVM permiten establecer límites de decisión complejos, incluso si los datos sólo tienen unas pocas características. Funcionan bien con datos de baja y alta dimensión (es decir, pocas y muchas características), pero no escalan muy bien con el número de muestras. Ejecutar SVM con datos de hasta 10.000 muestras puede funcionar bien, pero trabajar con conjuntos de datos de 100.000 o más puede ser un reto en términos de tiempo de ejecución y uso de memoria.
Otra desventaja de SVM es que requieren un cuidadoso preprocesamiento de los datos y el ajuste de los parámetros. Por eso, hoy en día, algunos investigadores utilizan modelos basados en árboles, como los bosques aleatorios o el gradient boosting (que requieren poco o ningún preprocesamiento) en muchas aplicaciones. Además, los modelos SVM son difíciles de inspeccionar, puede ser difícil entender por qué se ha hecho una predicción concreta, y puede ser difícil explicar el modelo a un inexperto. Aun así, puede valer la pena probar las SVM, sobre todo si todas las características representan medidas en unidades similares (por ejemplo, todas son intensidades de píxeles) y están en escalas similares.
Los parámetros importantes en las SVM con kernel son el parámetro de regularización C, la elección del kernel, y los parámetros específicos del kernel. Aunque principalmente nos centramos en el núcleo RBF, hay otras opciones disponibles en
scikit-learn. El núcleoRBFtiene sólo un parámetro,gamma, que es la inversa de la anchura del kernel de Gaus.gammayCcontrolan la complejidad del modelo, con valores grandes en cualquiera de ellos obtenemos un modelo más complejo. Por lo tanto, los buenos ajustes para los dos parámetros suelen estar fuertemente correlacionados, yCygammadeben ajustarse juntos.
6.18. Proyecto Integrador de Aprendizaje Automático#
6.18.1. Clasificación multiclase de cobertura forestal con Máquinas de Soporte Vectorial y despliegue MLOps#
6.18.2. Objetivo general#
Entrenar, evaluar e interpretar un modelo de clasificación multiclase con Support Vector Machines (SVM) sobre un conjunto de datos reales del entorno natural, incorporando:
Ajuste de hiperparámetros con
GridSearchCVVisualizaciones y métricas de evaluación
Despliegue de un servicio de inferencia con FastAPI
Contenerización con Docker
Automatización del flujo CI/CD con GitHub Actions
Un dashboard con Dash/Plotly para visualización de predicciones e inputs
Recomendaciones básicas de monitoreo de modelos
6.18.3. Contexto aplicado#
El monitoreo de ecosistemas forestales requiere herramientas confiables para identificar el tipo de cobertura vegetal de cada parcela. Usando variables topográficas y geográficas, un modelo supervisado puede clasificar eficientemente cada región según su cobertura (pinos, álamos, praderas, etc.), apoyando políticas de conservación y ordenamiento territorial.
6.18.4. Dataset sugerido: Forest CoverType (UCI)#
581 012 observaciones, 54 variables predictoras
Variable objetivo:
Cover_Type(siete tipos de vegetación codificados del 1 al 7)
6.18.5. Actividades a desarrollar#
6.18.5.1. 1. Preprocesamiento#
Carga del dataset desde archivo CSV o fuente directa
Análisis exploratorio y visualización de distribución de clases
Escalado de variables numéricas (
StandardScaler)División del dataset (
train_test_split)
6.18.5.2. 2. Construcción de modelos#
Pipelinecon escalado ySVC(descikit-learn)Comparar kernels:
Lineal (
kernel='linear')Radial (
kernel='rbf')Polinómico (
kernel='poly')
Usar
GridSearchCVpara optimizar:C,gamma,degree(según kernel)
Validación cruzada estratificada (
cv=5)
6.18.5.3. 3. Evaluación#
Matriz de confusión multiclase
Accuracy global y por clase
Visualización de errores y curva de validación
Comparación de kernels por desempeño y tiempo de entrenamiento
6.18.5.4. 4. Visualización interactiva (Dashboard)#
Crear una app interactiva con Dash (Plotly)
Selección de inputs por el usuario
Visualización del tipo de cobertura predicho
Histograma comparativo por clase
Tabla resumen de resultados por batch de inputs
6.18.6. Despliegue y arquitectura MLOps#
6.18.6.1. Servicio de inferencia#
Crear una API REST usando FastAPI
Endpoint
/predictque reciba JSON con nuevas observaciones y retorne la clase predichaValidación de schema de entrada con
pydanticSerialización del modelo (
joblibopickle)
6.18.6.2. Contenerización#
Crear un
Dockerfilepara empaquetar:Modelo + API + dependencias
Incluir archivo
requirements.txtcon versiones controladas
6.18.6.3. CI/CD con GitHub Actions#
Crear un flujo de trabajo (
.github/workflows/ci.yml) que:Instale dependencias
Ejecute pruebas automáticas (
pytest)Haga linting (
flake8oblack)Construya imagen Docker si todo pasa correctamente
(Opcional) Publicar imagen en DockerHub
6.18.6.4. Sugerencias de monitoreo#
Implementar logging de inputs y outputs en archivo CSV o SQLite
Proponer métrica de estabilidad: distribución de clases predichas
Revisión periódica de
accuracycon datos nuevosAlertas por desviación (drift) en la distribución de inputs
6.18.7. Herramientas sugeridas#
scikit-learn,pandas,numpymatplotlib,seaborn,plotly,dashjoblib,fastapi,pydanticdocker,pytest,flake8,GitHub Actions
6.18.8. Entregables#
Notebook con:
Preprocesamiento
Modelado con SVM y ajuste con
GridSearchCVEvaluación y visualizaciones
App Dash (
app.py) con dashboard interactivoAPI FastAPI (
api.py) con endpoints funcionalesDockerfile funcional
Flujo CI/CD (
.github/workflows/ci.yml)README.md con:
Descripción del proyecto
Instrucciones de ejecución del dashboard y API
Diagrama simple de la arquitectura del flujo completo
6.18.9. Resumen#
Dataset |
Tarea |
Tamaño |
Ventajas principales |
|---|---|---|---|
Forest CoverType (UCI) |
Clasificación SVM |
581 012 |
Real, multiclase, variables geográficas, apto para MLOps |
6.18.10. Instrucciones para el MLOps#
6.18.11. Estructura general del proyecto#
forest-cover-svm/
├── data/
│ └── cover\_type.csv
├── notebooks/
│ └── model\_training.ipynb
├── app/
│ ├── api.py
│ ├── app\_dash.py
│ └── model.joblib
├── Dockerfile
├── requirements.txt
├── .github/
│ └── workflows/
│ └── ci.yml
└── README.md
6.18.12. api.py — Servicio de inferencia con FastAPI#
from fastapi import FastAPI
from pydantic import BaseModel
import joblib
import numpy as np
app = FastAPI()
model = joblib.load("app/model.joblib")
class ForestInput(BaseModel):
features: list[float]
@app.post("/predict")
def predict(data: ForestInput):
X = np.array(data.features).reshape(1, -1)
prediction = model.predict(X)
return {"cover_type": int(prediction[0])}
6.18.13. app_dash.py — Dashboard interactivo con Dash y Plotly#
import dash
from dash import dcc, html, Input, Output
import joblib
import numpy as np
model = joblib.load("app/model.joblib")
app = dash.Dash(__name__)
server = app.server
app.layout = html.Div([
html.H2("Forest Cover Type Prediction (SVM)"),
dcc.Input(id='input-features', type='text', placeholder='Enter 54 comma-separated values'),
html.Button('Predict', id='predict-button'),
html.Div(id='output-prediction')
])
@app.callback(
Output('output-prediction', 'children'),
Input('predict-button', 'n_clicks'),
Input('input-features', 'value')
)
def make_prediction(n_clicks, input_str):
if n_clicks and input_str:
try:
features = np.array([float(i) for i in input_str.split(',')]).reshape(1, -1)
pred = model.predict(features)[0]
return f"Predicted Cover Type: {pred}"
except:
return "Error: Invalid input"
return ""
if __name__ == "__main__":
app.run_server(debug=True)
6.18.14. Dockerfile — Contenerización del proyecto#
FROM python:3.10-slim
WORKDIR /app
COPY requirements.txt .
RUN pip install --no-cache-dir -r requirements.txt
COPY app/ ./app/
COPY app/api.py .
COPY app/app_dash.py .
COPY app/model.joblib ./app/model.joblib
EXPOSE 8000
CMD ["uvicorn", "api:app", "--host", "0.0.0.0", "--port", "8000"]
6.18.15. requirements.txt — Dependencias del entorno#
fastapi
uvicorn
joblib
numpy
pandas
scikit-learn
dash
plotly
6.18.16. .github/workflows/ci.yml — Flujo de CI con GitHub Actions#
name: CI Pipeline
on:
push:
branches: [ main ]
pull_request:
branches: [ main ]
jobs:
build-test:
runs-on: ubuntu-latest
steps:
- name: Checkout repo
uses: actions/checkout@v3
- name: Set up Python
uses: actions/setup-python@v4
with:
python-version: 3.10
- name: Install dependencies
run: |
pip install -r requirements.txt
pip install flake8 pytest
- name: Lint code
run: flake8 app/ --ignore=E501
- name: Run unit tests
run: pytest tests/
- name: Build Docker image
run: docker build -t forest-svm-api .
6.18.17. README.md — Instrucciones base para el usuario#
# Forest Cover Classification with SVM
This project trains an SVM classifier on the Forest CoverType dataset, exposes it via a FastAPI service, and visualizes predictions using a Dash dashboard.
## Components
- `api.py`: FastAPI service to receive feature vectors and return predictions.
- `app_dash.py`: Dash/Plotly interface for manual prediction testing.
- `Dockerfile`: Containerizes the entire application.
- `.github/workflows/ci.yml`: GitHub Actions pipeline for linting, testing, and image build.
## Running locally
```bash
pip install -r requirements.txt
python app/api.py # Run FastAPI
python app/app_dash.py # Run dashboard
6.18.18. Docker#
docker build -t forest-svm-api .
docker run -p 8000:8000 forest-svm-api