
5. Random Forest y XGBoost#
5.1. Análisis#
Observación
Los árboles de clasificación se basan en una idea simple, pero poderosa, y se encuentran entre las técnicas más populares de clasificación. Son sistemas de varias etapas, y la clasificación de un patrón en una clase se realiza de forma secuencial. A través de una serie de pruebas, las clases se rechazan de forma secuencial hasta que se llega a una decisión a favor de una clase restante.
Cada una de las pruebas, cuyo resultado decide qué clases se rechazan, es de tipo binario “Sí” o “No” y se aplica a una sola característica. Nuestro objetivo es presentar la filosofía principal en torno a un tipo especial de árboles conocidos como árboles de clasificación binarios ordinarios (OBCT). Estos, pertenecen a una clase más general de métodos que construyen árboles, tanto para la clasificación como para la regresión, conocidos como árboles de clasificación y regresión (CART).
Formulación
La idea básica de los OBCT es dividir el espacio de características en (hiper)rectángulos; es decir, el espacio se divide mediante hiperplanos, que son paralelos a los ejes. Esto se ilustra en la Fig. 5.1
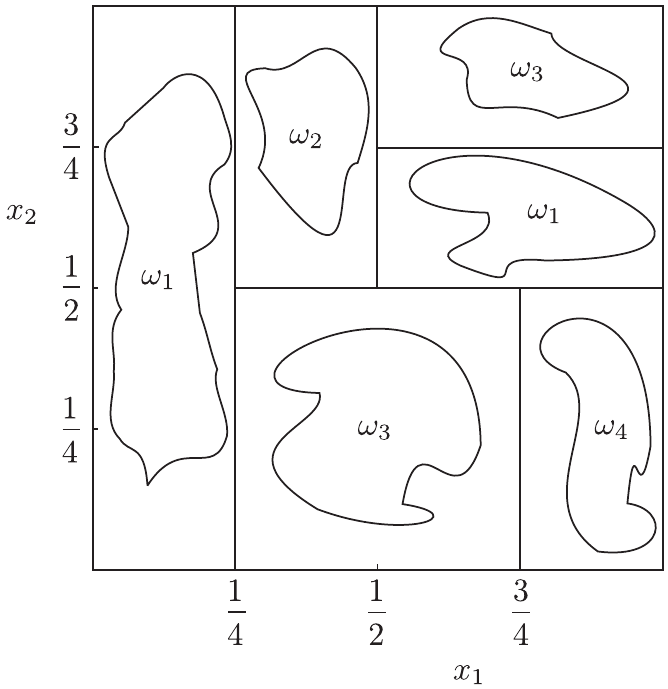
Fig. 5.1 Partición de espacio de características. Árbol de clasificación (OBCT). Fuente [Theodoridis, 2020].#
La partición del espacio en (hiper)rectángulos se realiza mediante una serie de “preguntas” de esta forma: ¿es el valor de la característica \(x_{i} < a\)?. Este también se conoce como el criterio de división. La secuencia de preguntas puede realizarse de forma agradable mediante el uso de un árbol. La Fig. 5.2 muestra el árbol correspondiente al caso ilustrado en la Fig. 5.1.
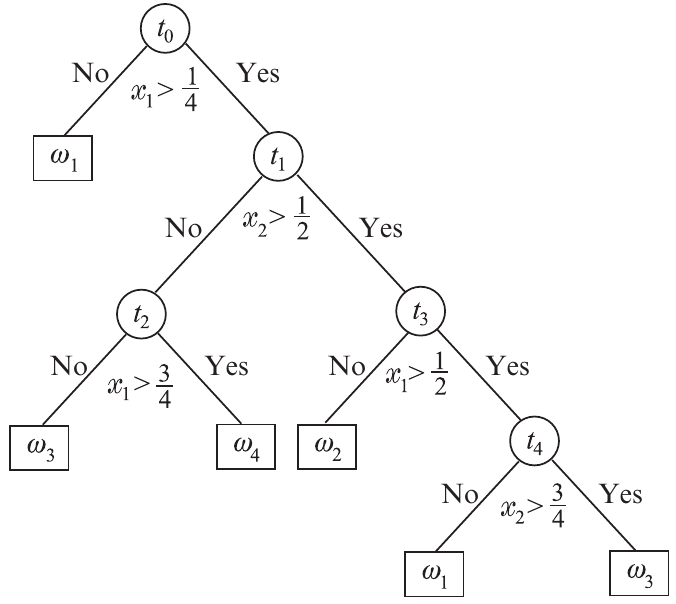
Fig. 5.2 Árbol de clasificación (OBCT). Partición del espacio para Fig. 5.1. Fuente [Theodoridis, 2020].#
Observación
Cada nodo del árbol realiza una prueba contra una característica individual y, si este no es un nodo hoja (sin división adicional), este es conectado a dos nodos descendientes (nodo de decisión): uno está asociado a la respuesta “Yes” y el otro a la respuesta “No”.
Partiendo del nodo raíz, se realiza un recorrido de decisiones sucesivas hasta llegar a un nodo hoja. Cada nodo hoja está asociado a una única clase. La asignación de un punto a una clase se realiza según la etiqueta del nodo hoja correspondiente. Este tipo de clasificación es conceptualmente simple y fácil de interpretar. Por ejemplo, en un sistema de diagnóstico médico, se puede empezar con una pregunta: ¿La temperatura es alta? si la respuesta es afirmativa, una segunda pregunta puede ser: ¿Presenta moquea?. El proceso continúa hasta que se llega a una decisión final sobre la enfermedad.
Además, los árboles son útiles para construir sistemas de razonamiento en la inteligencia artificial. Por ejemplo, la existencia de objetos específicos, que se deduce a través de una serie de preguntas relacionadas, basadas en los valores de ciertas características (de alto nivel), puede conducir al reconocimiento de una escena o de un objeto representado en una imagen.
Una vez desarrollado el árbol, la clasificación es sencilla. El mayor reto consiste en construir el árbol, explotando la información que reside en el conjunto de datos de entrenamiento. Las principales preguntas a las que uno se enfrenta al diseñar un árbol, entre otras que se discutirán más adelante, son:
¿Qué criterio de división debe adoptarse?
¿Cuándo se debe detener el crecimiento de un árbol y declarar un nodo como final?
¿Cómo se asocia un nodo hoja a una clase concreta?
Criterio de división: Ya hemos dicho que las preguntas que se hacen en cada nodo son del tipo
El objetivo es seleccionar un valor adecuado para el umbral \(a\). Supongamos que, partiendo del nodo raíz, el árbol ha crecido hasta el nodo actual \(t\). Cada nodo, \(t\), está asociado a un subconjunto \(X_{t}\subseteq X\) del conjunto de datos de entrenamiento, \(X\). Este es el conjunto de los puntos de entrenamiento que han sobrevivido a este nodo, después de las pruebas que han tenido lugar en los nodos anteriores del árbol.
Por ejemplo, en la Fig. 5.2, un número de puntos, que pertenecen, digamos, a la clase \(\omega_{1}\), no participarán en el nodo \(t_{1}\) porque ya han sido asignados en un nodo hoja previamente etiquetado. El propósito de un criterio de división es dividir \(X_{t}\) en dos subconjuntos disyuntos, digamos \(X_{tY}\), y \(X_{tN}\), dependiendo de la respuesta a la pregunta específica en el nodo \(t\). Para cada división, se cumple lo siguiente:
El objetivo en cada nodo es seleccionar qué característica se va a probar y también cuál es el mejor valor del umbral \(a\). La filosofía adoptada es hacer la elección de manera que cada división genere conjuntos, \(X_{tY}\), \(X_{tN}\), que sean más homogéneos en cuanto a la clase en comparación con \(X_{t}\). En otras palabras, los datos en cada uno de los dos conjuntos descendientes deben mostrar una mayor preferencia por clases específicas, en comparación con el conjunto antecesor.
En la terminología adoptada, los conjuntos \(X_{tY}\) y \(X_{tN}\) deben ser más puros en comparación con \(X_{t}\) . Así pues, primero debemos seleccionar un criterio que mida la impureza y, a continuación, calcular el valor umbral y elegir la característica específica (que se va a probar) para maximizar la disminución de la impureza del nodo.
Por ejemplo, una medida común para cuantificar la impureza del nodo, \(t\), es la entropía, definida como
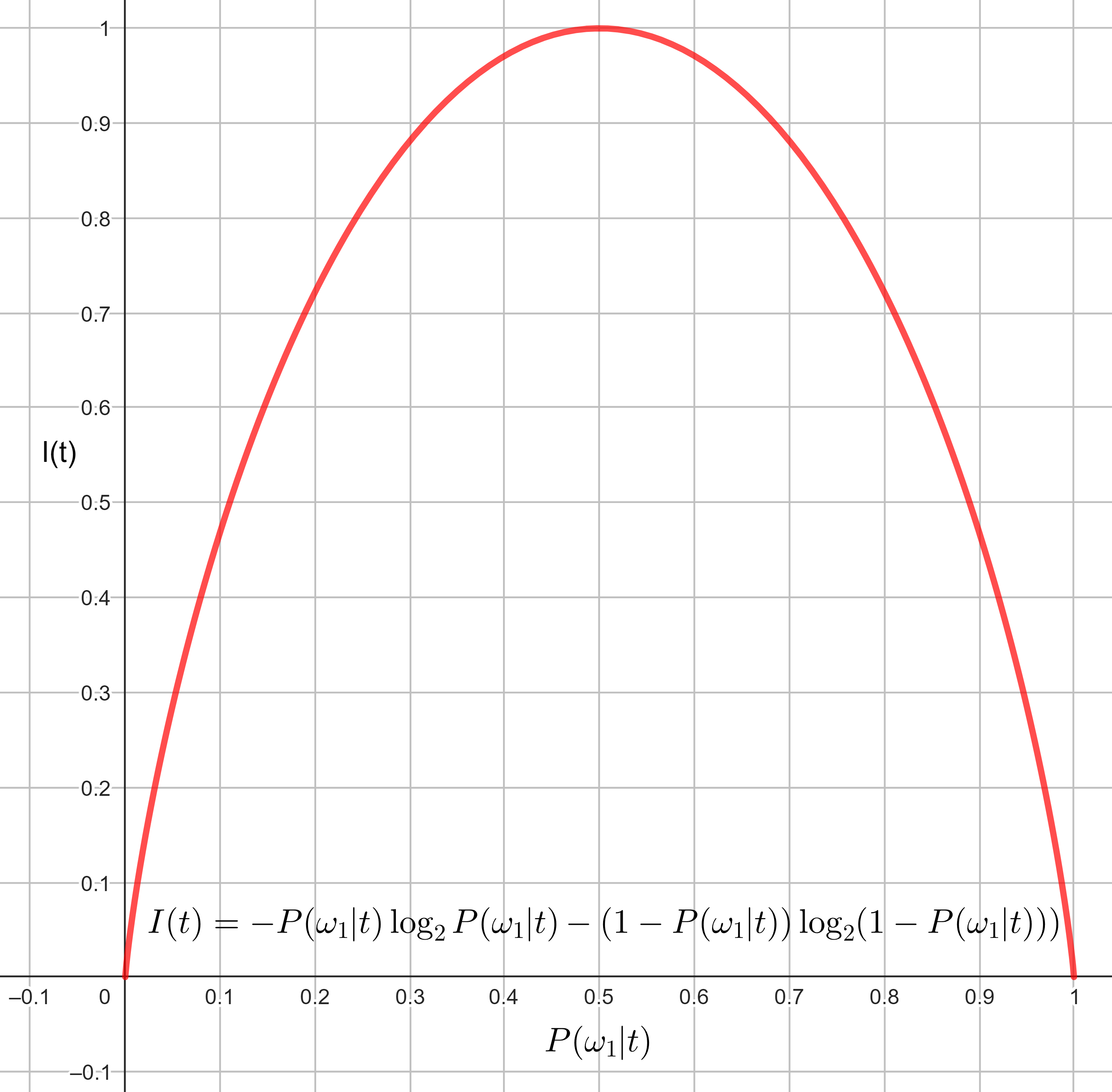
Fig. 5.3 Función de entropía \(I(t)\) para clasificación binaria.#
El valor máximo de \(I(t)\) se produce si todas las probabilidades son iguales (máxima impureza), y el valor más pequeño, que es igual a cero, cuando sólo uno de los valores de probabilidad es uno y el resto es igual a cero. Las probabilidades se aproximan como
\(N_{t}^{m}\) es el número de puntos de la clase \(m\) en \(X_{t}\), y \(N_{t}\) el número total de puntos en \(X_{t}\). La disminución de la impureza del nodo, tras dividir los datos en dos conjuntos, se define como
\[ \Delta I(t)=I(t)-\frac{N_{t_{Y}}}{N_{t}}I(t_{Y})-\frac{N_{t_{N}}}{N_{t}}I(t_{N}), \]donde \(I(t_{Y})\) y \(I(t_{N})\) son las impurezas asociadas a los dos nuevos conjuntos, respectivamente. Esto es, disminución de la impureza del nodo es la diferencia entre la entropía de un nodo padre y la suma ponderada de las entropías de sus nodos hijos. A esta última expresión \(\Delta I(t)\), también se le conoce como ganancia de información.
Ejemplo: Cálculo de Entropía
Calculemos el índice de entropía \(I(t)\) para 3 casos diferentes de un conjunto con 4 balotas de dos colores diferentes, rojo y azul:
\(I(t)\approx 0\): Baja incertidumbre. 4 balotas rojas y 0 balotas azules
\[\begin{split} \begin{align*} I(t)&=-P(\text{rojo})\cdot\log_{2}(P(\text{rojo}))-P(\text{azul})\cdot\log_{2}(P(\text{azul}))\\ &=-\frac{4}{4}\cdot\log_{2}\frac{4}{4}-\frac{0}{4}\cdot\log_{2}\frac{0}{4}=0 \end{align*} \end{split}\]Como el conjunto es completamente puro (una sola clase), la entropía es cero, indicando baja incertidumbre.
\(I(t)\approx 1\): Mucha incertidumbre. 2 balotas rojas y 2 balotas azules
\[\begin{split} \begin{align*} I(t)&=-P(\text{rojo})\cdot\log_{2}(P(\text{rojo}))-P(\text{azul})\cdot\log_{2}(P(\text{azul}))\\ &=-\frac{2}{4}\cdot\log_{2}\frac{2}{4}-\frac{2}{4}\cdot\log_{2}\frac{2}{4}=1 \end{align*} \end{split}\]Esto indica máxima incertidumbre, ya que las clases están balanceadas, y el modelo tiene dificultad para decidir una categoría dominante.
3 balotas rojas y 1 balota azul:
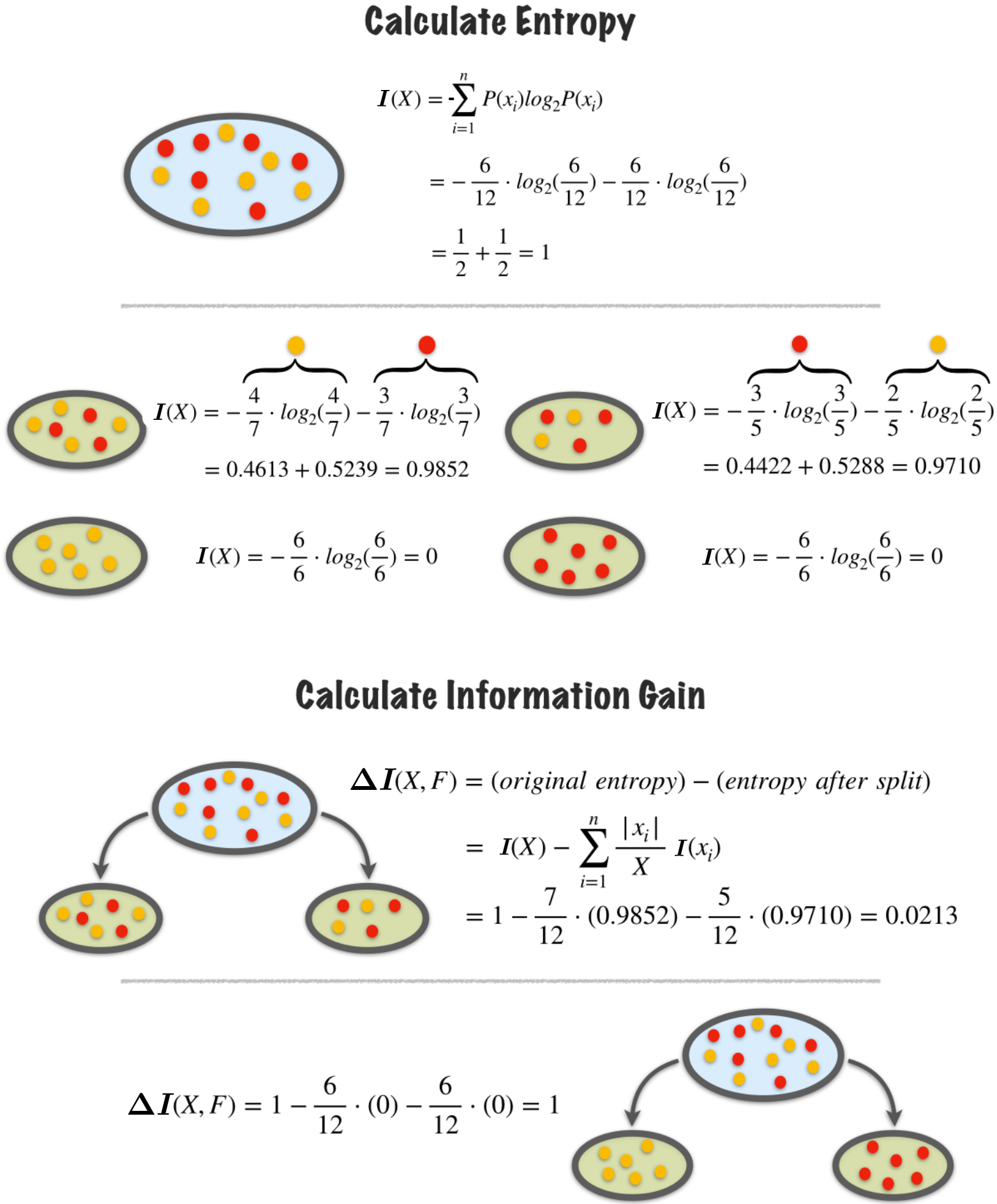
Fig. 5.4 Pureza de nodos en un árbol de decisión. Fuente towardsdatascience.#
El objetivo ahora es seleccionar la característica específica \(x_{i}\) y el umbral \(a_{t}\) tal que, \(\Delta I(t)\) sea máximo. Esto definirá ahora dos nuevos nodos descendientes de \(t\), a saber, \(t_{N}\) y \(t_{Y}\); así, el árbol crece con dos nuevos nodos. Una forma de buscar distintos valores umbral es la siguiente:
Para cada una de las características \(x_{i},~i=1,2\dots,l\), realice un ranking de los valores \(x_{in},~n=1,2,\dots,N_{t}\), que toma esta característica entre los puntos en \(X_{t}\).
A continuación, defina una secuencia de valores umbral correspondientes, \(a_{in}\) que estén en el medio, entre valores distintos consecutivos de \(x_{in}\)
Seguidamente, compruebe el cambio de impureza que se produce para cada uno de estos valores umbral y quédese con el que consiga la máxima disminución.
Repita el proceso para todas las características y, por último, quédese con la combinación que dé como resultado la mejor disminución máxima.
Además de la entropía, pueden utilizarse otros índices de medición de impurezas. Una alternativa popular, que da como resultado un máximo ligeramente superior que el de entropía, es el llamado índice de Gini, definido como
Este índice también es cero si uno de los valores de probabilidad es igual a 1 y el resto son cero, y toma su valor máximo cuando todas las clases son equiprobables.
Regla de detención de división (stop-splitting)
La pregunta obvia cuando crece un árbol es cuándo dejar de cultivarlo. Una forma posible es adoptar un valor umbral, \(T\), y dejar de dividir un nodo una vez que el valor máximo \(\Delta I(t)\), para todas las divisiones posibles, sea menor que \(T\).
Otra posibilidad es parar cuando la cardinalidad de \(X_{t}\) es menor que un número determinado o si el nodo es puro, en el sentido de que todos los puntos que lo componen pertenecen a una única clase.
Podado del árbol
La experiencia ha demostrado que el crecimiento de un árbol y el uso de una regla de parada no siempre funciona bien en la práctica; el crecimiento puede detenerse antes de tiempo o puede dar lugar a árboles de tamaño muy grande.
Una práctica común es hacer crecer primero un árbol hasta un tamaño grande y luego adoptar una técnica de poda para eliminar nodos. Se pueden utilizar diferentes criterios de poda; uno muy popular es combinar una estimación de la probabilidad de error con un índice de medición de la complejidad [Breiman et al., 1984, Ripley, 2007].
Observation 5.1
Entre las notables ventajas de los árboles de decisión está el hecho de que pueden tratar de forma natural mezclas de variables numéricas y categóricas. Además, se adaptan bien a grandes conjuntos de datos. Pueden tratar eficazmente datos faltantes. En muchos dominios, no se conocen todos los valores de las características para cada patrón. Los valores pueden no haber sido registrados, o pueden ser demasiado costosos de obtener.
Debido a su simplicidad estructural, son fácilmente interpretables; en otras palabras, es posible que un humano entienda la razón de la salida del algoritmo de aprendizaje. En algunas, como en las decisiones financieras, esto es un requisito legal. Por otro lado, el rendimiento de predicción de los clasificadores de árbol no es tan bueno como el de otros métodos, como las máquinas de soporte vectorial y las redes neuronales, que se tratarán en posteriores capítulos
Uno de los principales inconvenientes asociados a los clasificadores de árbol es que son inestables. Es decir, un pequeño cambio en el conjunto de datos de entrenamiento puede dar lugar a un árbol muy diferente. La razón de esto radica en la naturaleza jerárquica de los clasificadores de árbol. Un error que se produce en un nodo en un nivel alto del árbol se propaga hasta las hojas inferiores.
Bagging (Bootstrap Aggregating)
Bagging (Bootstrap Aggregating) es una técnica que puede reducir la varianza y mejorar el rendimiento del error de generalización.
La idea básica es crear un número de variantes \(B\), \(~X_{1}, X_{2},\dots, X_{B}\), del conjunto de entrenamiento, \(X\), utilizando técnicas bootstrap, mediante un muestreo uniforme de \(X\) con reemplazo.
Para cada una de las variantes del conjunto de entrenamiento, \(X_{i}\), se construye un árbol, \(T_{i}\).
La decisión final para la clasificación de un punto dado es a favor de la clase predicha por la mayoría de los arboles subclasificadores, \(T_{i}, i = 1, 2,\dots, B\) [Breiman, 1996].
Bosques Aleatorios (Random Forest)
Los Bosques Aleatorios (Random Forest) utilizan la idea de bagging junto con la selección aleatoria de características [Breiman, 2001]. La diferencia con el bagging radica en la forma en que se construyen los árboles de decisión.
La característica a dividir en cada nodo se selecciona como la mejor entre un conjunto de \(F\) características elegidas al azar, donde \(F\) es un parámetro definido por el usuario.
Esta aleatoriedad adicional introducida tiene un efecto sustancial en la mejora del rendimiento. Los bosques aleatorios suelen tener una precisión predictiva muy buena y se han utilizado en una serie de aplicaciones, como el reconocimiento de la postura del cuerpo en términos del popular sensor Kinect de Microsoft [Shotton et al., 2011].
Además de los métodos anteriores, recientemente, también se han sugerido técnicas Bayesianas utilizadas para estabilizar el rendimiento de los árboles; véase [Chipman et al., 2010, Wu et al., 2007]. Por supuesto, el efecto de utilizar múltiples árboles, es perder una de las principales ventajas de los árboles, su facilidad de interpretación.
Regla de asignación de clase
Una vez que se declara que un nodo \(t\) es un nodo hoja, se le asigna una etiqueta de clase; normalmente por mayoría. Es decir, se le asigna la etiqueta de la clase a la que pertenecen la mayoría de los datos de \(X_{t}\).
Solución a situaciones de empates:
Random Forestrealiza predicciones reuniendo las decisiones de muchos árboles:Cada árbol asigna una clase (voto “duro”) o una distribución de probabilidad (ver Ecuación (5.1)) por clase (voto “blando” ->
predict_proba).La lógica habitual de
RandomForestClassifier.predictusa las probabilidades promedio (promedio depredict_probade cada árbol) y luego toma el índice conargmax.Un “empate perfecto” en el conteo de votos (por ejemplo, 50 árboles votan 0 y 50 votan 1) no implica necesariamente empate en la probabilidad promedio; el promedio de probabilidades suele romperlo.
Si también las probabilidades promedio son exactamente iguales (caso extremo),
np.argmaxdevuelve el primer índice con el máximo — es decir, la clase con índice más bajo enclf.classes_.
¿Cómo lo hace scikit-learn internamente?
Flujo simplificado:
Cada árbol calcula
proba_i(x)(vector de probabilidades por clase para la muestrax), normalmente la distribución de clases en la hoja normalizada.Random Forest calcula
avg_proba(x) = mean_i proba_i(x).predict(x)haceargmax(avg_proba(x)).np.argmaxdevuelve el primer índice con el valor máximo — eso rompe empates determinísticamente (clase de menor índice).
5.2. Combinación de clasificadores#
Hasta ahora, hemos revisado en detalle una serie de clasificadores, y se presentarán más métodos en las siguientes secciones, relativos a las máquinas de vectores de soporte y las redes neuronales. La pregunta obvia a la que se enfrenta un profesional/investigador sin experiencia es: ¿qué método uso entonces? Por desgracia, no hay una respuesta definitiva.
No free lunch theorem
El objetivo del diseño de cualquier clasificador, y en general de cualquier esquema de aprendizaje es proporcionar un buen rendimiento de generalización. Sin embargo, no hay razones independientes del contexto o del uso para apoyar una técnica de aprendizaje en lugar de otra.
Cada tarea de aprendizaje, representada por el conjunto de datos disponible, mostrará una preferencia por un esquema de aprendizaje específico que se ajuste a las especificidades del problema en cuestión.
Un algoritmo que obtiene la máxima puntuación en un problema puede obtener una puntuación baja en otro. Esto se resume a veces como el
Teorema de la no gratuidad (No free lunch theorem)
En la práctica, hay que probar diferentes métodos de aprendizaje dentro de los disponibles, cada uno optimizado para la tarea específica, y probar su rendimiento de generalización con un conjunto de datos independiente distinto del utilizado para el entrenamiento, utilizando, por ejemplo, el método de exclusión o cualquiera de sus variantes.
A continuación, se mantiene y se utiliza el método que ha obtenido la mejor puntuación para la tarea específica. Con este fin, hay una serie de esfuerzos importantes para comparar diferentes clasificadores contra diferentes conjuntos de datos y medir el rendimiento “medio”, mediante el uso de diferentes índices estadísticos para cuantificar el rendimiento global de cada clasificador frente a los conjuntos de datos.
Esquemas de combinación de clasificadores
Una tendencia para mejorar el rendimiento es combinar diferentes clasificadores y explotar sus ventajas individuales. Una observación que justifica este enfoque es que, durante las pruebas, hay patrones en los que incluso el mejor clasificador para una tarea concreta no logra predecir su verdadera clase. En cambio, los mismos patrones pueden ser clasificados correctamente por otros clasificadores, con un rendimiento global inferior.
Esto muestra que puede haber cierta complementariedad entre los distintos clasificadores, y la combinación puede conducir a un mayor rendimiento en comparación con el obtenido por el mejor (único) clasificador. Recordemos que el bagging mencionado anteriormente, es un tipo de combinación de clasificadores. La cuestión que se plantea ahora es seleccionar un esquema de combinación. Hay diferentes esquemas, y los resultados que proporcionan pueden ser diferentes. A continuación, resumimos los esquemas de combinación más populares.
Regla de la media aritmética
Suponiendo que utilizamos \(L\) clasificadores, en los que cada uno da un valor de probabilidad posterior, \(P_{j}(\omega_{i}|\boldsymbol{x}), i = 1,2,\dots,M,~j = 1, 2, . . . L\), la decisión sobre la asignación de la clase se basa en la siguiente regla:
Esta regla equivale a calcular la probabilidad posterior “final”, \(P(\omega_{i}|\boldsymbol{x})\), por medio de minimización de la distancia media de Kullback-Leibler
Regla de promedio geométrica
Esta regla es el resultado de minimizar la formulación alternativa de distancia de Kullback-Leibler (nótese que esta distancia no es simétrica); en otras palabras
lo que da lugar a
Apilamiento (Stacking)
Una forma alternativa es utilizar una media ponderada de las salidas de los clasificadores individuales, donde los pesos de la combinación se obtienen de forma óptima utilizando los datos de entrenamiento. Supongamos que la salida de cada clasificador individual, \(f_{j}(x)\), es de tipo suave (infinitamente diferenciable); por ejemplo, una estimación de probabilidad posterior, como antes. Entonces, la salida combinada viene dada por
donde los pesos son estimados vía la siguiente tarea de optimización:
donde, \(\mathcal{L}(\cdot,\cdot)\) es una función de pérdida; por ejemplo, la del error cuadrático.
Sin embargo, adoptar la anterior optimización, basada en el conjunto de datos de entrenamiento, puede conducir a un sobreajuste. De acuerdo con el apilamiento [Wolpert, 1992] se adopta un razonamiento de validación cruzada y en lugar de \(f_{j}(\boldsymbol{x}_{n})\), empleamos \(f_{j}^{(-n)}(\boldsymbol{x}_{n})\), donde este último es la salida del \(j\)-ésimo clasificador entrenado en los datos tras excluir el par \((y_{n}, x_{n})\). En otras palabras, los pesos se estiman mediante
A veces, las ponderaciones tienen que ser positivas y sumar uno, lo que da lugar a una tarea de optimización restringida.
Regla de votación por mayoría
Los métodos anteriores pertenecen a la familia de reglas soft-type. Una alternativa popular es una regla hard-type, que se basa en un esquema de votación. Se decide a favor de la clase para la que hay consenso o al menos \(l_{c}\) clasificadores están de acuerdo en la etiqueta de clase, donde
En caso contrario, la decisión es de rechazo (es decir, no se toma ninguna decisión).
Reglas del Tipo: Hard-Soft
Una regla de clasificación soft generalmente estima las probabilidades condicionales de clase de forma explícita y, a continuación, realiza la predicción de clase basada en la mayor probabilidad estimada. Por el contrario, la clasificación hard omite el requisito de estimar la probabilidad de la clase y estima directamente el límite de clasificación.
Regla de la mediana
Cuando valores atípicos están presentes, se puede utilizar en su lugar el valor de la mediana:
Ocurre que, el no free lunch theorem también es válido para las reglas de combinación; no hay una regla universalmente óptima. Todo depende de los datos de que se disponga; véase [Jain et al., 2000]. Hay otras cuestiones relacionadas con la teoría de la combinación de clasificadores; por ejemplo, ¿cómo se eligen los clasificadores que se van a combinar? ¿Deben ser dependientes o independientes?.
Además, la combinación no implica necesariamente una mejora del rendimiento, en algunos casos, se puede experimentar una pérdida de rendimiento (mayor tasa de error) en comparación con el mejor clasificador (único). Por tanto, la combinación debe realizarse con cuidado [Koutroumbas and Theodoridis, 2008, Kuncheva, 2014].
5.3. Enfoque Boosting#
Observation 5.2
¿Un algoritmo de aprendizaje débil, es decir, uno que funciona ligeramente mejor que una adivinación aleatoria, puede convertirse en uno fuerte con un buen índice de rendimiento?.
El enfoque boosting es un procedimiento para combinar o “reforzar (boost)” el rendimiento de los clasificadores débiles(clasificadores cuyas estimaciones de parámetros suelen ser imprecisas y ofrecen un rendimiento deficiente) con el fin de obtener un mejor clasificador. Se diferencia del bagging en que es un procedimiento determinista y genera conjuntos de entrenamiento y clasificadores secuencialmente, basándose en los resultados de la iteración anterior. En cambio, el bagging genera los conjuntos de entrenamiento aleatoriamente y puede generar los clasificadores en paralelo.
Observación
Boosting asigna un peso a cada patrón en el conjunto de entrenamiento, reflejando su importancia, y construye un clasificador utilizando el conjunto de entrenamiento y el conjunto de pesos. Por lo tanto, requiere un clasificador que pueda manejar pesos en las muestras de entrenamiento (algunos clasificadores pueden ser incapaces de admitir patrones ponderados).
En este caso, se puede muestrear un subconjunto de los ejemplos de entrenamiento de acuerdo con la distribución de los pesos (ponderación de muestras de entrenamiento) y utilizar estos ejemplos para entrenar al clasificador en la siguiente etapa de la iteración. El aprendiz final se obtiene mediante una media ponderada de todos los aprendices de base (débiles) jerárquicamente diseñados. Por lo tanto, el boosting también puede considerarse un esquema para combinar diferentes aprendices.
Dado un número suficiente de iteraciones, se puede mejorar significativamente lo (pobre) del aprendiz débil. Por ejemplo, en algunos casos de clasificación, el error de entrenamiento puede tender a cero a medida que aumenta el número de iteraciones. El entrenamiento de un clasificador mediante una manipulación adecuada de los datos de entrenamiento (de hecho, el mecanismo de ponderación identifica las muestras difíciles, las que siguen fallando, y pone más énfasis en ellas) se puede obtener un clasificador fuerte. Por supuesto, como veremos más adelante, el hecho de que el error de entrenamiento tienda a cero no significa necesariamente que el error de prueba llegue a cero.
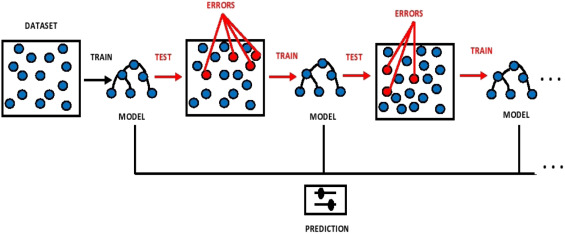
Fig. 5.5 Ilustración del Arbol Boosting: Fuente [Kiangala and Wang, 2021].#
Algoritmo AdaBoost (Adaptive Boosting)
Considere una tarea de clasificación de dos clases y supongamos que se nos da un conjunto de \(N\) observaciones de entrenamiento, \((y_{n}, \boldsymbol{x}_{n}),~n=1,2,\dots,N\), con \(y_{n}\in\{-1, 1\}\). Nuestro objetivo es diseñar un clasificador binario,
donde
y \(\phi(\boldsymbol{x}; \boldsymbol{\theta}_{k})\in\{-1, 1\}\), es el clasificador base en la iteración \(k\), definido en términos de un conjunto de parámetros, \(\boldsymbol{\theta}_{k},~k=1,2,\dots, K\) a ser estimados.
El clasificador base se selecciona como uno binario. El conjunto de parámetros desconocidos se obtienen mediante step-wise y de forma greedy; es decir, en cada iteración \(i\), solo optimizamos con respecto a un único par, \((a_{i}, \boldsymbol{\theta}_{i})\) manteniendo los parámetros \(a_{k}, \boldsymbol{\theta}_{k},~k=1,2,\dots,i-1\), obtenidos en los pasos anteriores, fijos.
Nótese que lo ideal sería optimizar respecto a todos los parámetros desconocidos, \(a_{k}\), \(k=1,2,\dots,K\), simultáneamente, sin embargo, esto conduciría a una tarea de optimización muy exigente, desde el punto de vista computacional. Los algoritmos greedy son muy populares debido a su simplicidad computacional, y conducen a un muy buen rendimiento en una amplia gama de tareas de aprendizaje.
Supongamos que nos encontramos en el paso de iteración \(i\)-ésimo; consideremos la suma parcial de términos
Entonces, podemos escribir la siguiente recursion
\[ F_{i}(\cdot)=F_{i-1}(\cdot)+a_{i}\phi(\cdot; \boldsymbol{\theta}_{i}),\quad i=1,2,\dots,K, \]partiendo de una condición inicial. Con base en el razonamiento greedy, \(F_{i-1}(\cdot)\) se supone conocido y el objetivo es optimizar con respecto al conjunto de parámetros \(a_{i},~\boldsymbol{\theta}_{i}\).
Para la tarea de optimización, debe adoptarse una función de pérdida. Sin duda, existen diferentes opciones, que dan distintos nombres al algoritmo derivado. Una función de pérdida popular, utilizada para la clasificación, es la pérdida exponencial, definida como
\[ \mathcal{L}(y, F(\boldsymbol{x}))=\exp(-yF(\boldsymbol{x})):\quad\text{exponential loss function}, \]y da lugar al algoritmo boosting adaptativo (AdaBoost).
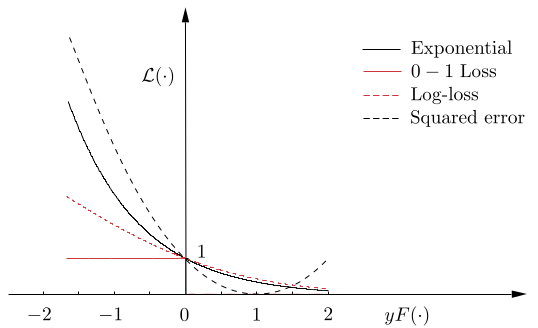
Fig. 5.6 Pérdida 0-1, exponencial, log-loss y error al cuadrado. Fuente [Theodoridis, 2020].#
La función de pérdida exponencial, junto con la función de pérdida 0-1, se muestran en Fig. 5.6. La primera puede considerarse un límite superior (diferenciable) de la función de pérdida 0-1 (no diferenciable).
Observe que la pérdida exponencial coloca más peso sobre los errores de clasificación \((yF(\boldsymbol{x}) < 0)\) en comparación con los correctamente identificados \((yF(\boldsymbol{x}) > 0)\). Empleando la función de pérdida exponencial, el conjunto \(a_{i},\boldsymbol{\theta}_{i}\) se obtiene mediante la respectiva función de coste empírica, de la siguiente manera:
Esta tarea de optimización también se realiza en dos pasos. En primer lugar, \(a\) se trata de forma fija y optimizamos con respecto a \(\boldsymbol{\theta}\),
(5.5)#\[\begin{split} \begin{align*} \boldsymbol{\theta}_{i}&=\text{arg}\text{min}_{a,\boldsymbol{\theta}}\sum_{n=1}^{N}\exp\left(-y_{n}(F_{i-1}(\boldsymbol{x}_{n})+a\phi(\boldsymbol{x}_{n};\boldsymbol{\theta}))\right)\\ &=\text{argmin}_{\boldsymbol{\theta}}\sum_{n=1}^{N}\omega_{n}^{(i)}\exp(-y_{n}a\phi(\boldsymbol{x}_{n};\boldsymbol{\theta})), \end{align*} \end{split}\]donde \(\omega_{n}^{(i)}:=\exp(-y_{n}F_{i-1}(\boldsymbol{x}_{n})),~n=1,2,\dots,N.\)
Observe que \(\omega_{n}^{(i)}\) no depende ni de \(a\) ni de \(\phi(x_{n}; \boldsymbol{\theta})\), por lo que puede considerarse un peso asociado a la muestra \(n\). Además, su valor depende por completo de los resultados obtenidos en las pruebas anteriores.
Ahora nos centraremos en el coste de Ecuación (5.4). La optimización depende de la forma específica del clasificador base. Nótese, sin embargo, que la función de pérdida es de forma exponencial. Además, el clasificador es binario, de modo que \(\phi(\boldsymbol{x}, \boldsymbol{\theta})\in\{-1, 1\}\).
Si suponemos que \(a > 0\) (volveremos a ello pronto) la optimización de Ecuación (5.4) se ve fácilmente que es equivalente a optimizar el siguiente coste:
(5.6)#\[ \boldsymbol{\theta}_{i}=\text{argmin}_{\theta}P_{i},~\text{donde}~P_{i}:=\sum_{n=1}^{N}\omega_{n}^{(i)}\chi_{(-\infty, 0]}(y_{n}\phi(\boldsymbol{x}_{n}, \boldsymbol{\theta})), \]y \(\chi_{(-\infty, 0]}\) es la función de pérdida 0-1.
En otras palabras, solo contribuyen los puntos mal clasificados (\(y_{n}\phi(\boldsymbol{x}_{n}; \boldsymbol{\theta}) < 0\)). Nótese que \(P_{i}\) es el error ponderado del clasificador empírico. Claramente, cuando se minimiza el error de clasificación en la Ecuación (5.6), el coste de Ecuación (5.4) también se minimiza, porque la pérdida exponencial coloca mayor peso a los puntos mal clasificados (cota superior para \(\chi_{(-\infty, 0]}\)).
Para garantizar que \(P_{i}\) permanece en el intervalo \([0, 1]\), los pesos son normalizados a la unidad dividiendo por la suma respectiva; nótese que esto no afecta al proceso de optimización. En otras palabras, \(\boldsymbol{\theta}_{i}\) puede calcularse para minimizar el error de clasificación empírico, cometido por el clasificador base. Para clasificadores base de estructura muy simple, dicha minimización es computacionalmente factible.
Una vez calculado el \(\boldsymbol{\theta}_{i}\) óptimo, a partir de las respectivas definiciones,
(5.7)#\[ \sum_{y_{n}\phi(\boldsymbol{x}_{n}; \boldsymbol{\theta}_{i})<0}\omega_{n}^{(i)}=P_{i},~\text{y}~\sum_{y_{n}\phi(\boldsymbol{x}_{n}; \boldsymbol{\theta}_{i})>0}\omega_{n}^{(i)}=1-P_{i}. \]
Si se toma la derivada con respecto a \(a\) y se iguala a cero, se obtiene
Nótese que si \(P_{i} < 0.5\), entonces \(a_{i} > 0\), que es lo que se espera en la práctica. Una vez estimados \(a_{i}\) y \(\boldsymbol{\theta}_{i}\) las ponderaciones para la siguiente iteración vienen dadas por
\[ \omega_{n}^{(i+1)}=\frac{\exp(-y_{n}F_{i}(\boldsymbol{x}_{n}))}{Z_{i}}=\frac{\omega_{n}^{(i)}\exp(-y_{n}a_{i}\phi(\boldsymbol{x}_{n}, \boldsymbol{\theta}_{i}))}{Z_{i}}, \]donde \(Z_{i}\) es el factor normalizado
\[ Z_{i}:=\sum_{n=1}^{N}\omega_{n}^{(i)}\exp(-y_{n}a_{i}\phi(\boldsymbol{x}_{n}; \boldsymbol{\theta}_{i})). \]
Si se observa la forma en que se forman los pesos, se puede comprender uno de los principales secretos subyacentes al algoritmo AdaBoost: El peso asociado a una muestra de entrenamiento \(\boldsymbol{x}_{n}\) aumenta (disminuye) con respecto a su valor en la iteración anterior, dependiendo de si el patrón ha fallado (tenido éxito) respecto a su valor en la iteración anterior.
Además, el porcentaje de disminución (aumento) depende del valor de \(a_{i}\), que controla la importancia relativa en la construcción del clasificador final. Las muestras difíciles, que siguen fallando en iteraciones sucesivas, ganan importancia en su participación en el valor de error empírico ponderado.
Para el caso del AdaBoost, puede demostrarse que el error de entrenamiento tiende a cero exponencialmente rápido. El esquema se resume en el siguiente algoritmo, introducido por Yoav Freund y Robert Schapire quienes recibieron el prestigioso premio Gödel por este algoritmo en 2003.
Algorithm 5.1 (Algoritmo AdaBoost)
Inicialización
Inicializa: \(\omega_{n}^{(1)}=1/N,~i=1,2,\dots,N\)
Inicializa: \(i=1\)
Repeat
Calcular el óptimo \(\boldsymbol{\theta}_{i}\) en \(\phi(\cdot; \boldsymbol{\theta}_{i})\) minimizando \(P_{i}\)
Calcular el óptimo \(P_{i}\)
\(a_{i}=\displaystyle{1/2[\ln(1-P_{i})/P_{i}]}\)
\(Z_{i}=0\)
For \(n=1,2,\dots,N\), Do:
\(\omega_{n}^{(i+1)}=\omega_{n}^{(i)}\exp(-y_{n}a_{i}\phi(\boldsymbol{x}_{n}; \boldsymbol{\theta}_{i}))\)
\(Z_{i}=Z_{i}+\omega_{n}^{(i+1)}\)
End For
For \(n=1,2,\dots,N\), Do:
\(\omega_{n}^{(i+1)}=\omega_{n}^{(i+1)}/Z_{i}\)
End For
\(K=i\)
\(i=i+1\)
Until Un criterio de parada se cumpla.
\(f(\cdot)=\text{sgn}\left(\sum_{k=1}^{K}a_{k}\phi(\cdot, \boldsymbol{\theta}_{k})\right)\)
Observación
El enfoque propuesto implica la partición del conjunto de datos en dos subconjuntos: uno de entrenamiento y otro de prueba. El primero se emplea para el entrenamiento del algoritmo, mientras que en cada iteración se evalúa la pérdida binaria 0-1 en el conjunto de prueba. Se observa una disminución garantizada de la pérdida exponencial en el conjunto de entrenamiento y, por lo general, también de la pérdida binaria 0-1.
Aunque los errores en el conjunto de prueba suelen disminuir al principio del algoritmo, llega un punto en el que comienzan a aumentar significativamente. Cuando esto sucede, revertimos el clasificador a la forma que dio el mejor error de prueba y descartamos cualquier cambio posterior (es decir, clasificadores débiles adicionales).
5.4. La función Log-Loss#
En AdaBoost, se empleó la función de pérdida exponencial. Desde un punto de vista teórico, esto puede justificarse con el siguiente argumento. Consideremos el valor medio con respecto a la etiqueta binaria, \(y\), de la función de pérdida exponencial
Tomando derivada con respecto a \(F(\boldsymbol{x})\) e igualando a cero, fácilmente obtenemos el mínimo de (5.8) el cual ocurre en
El logaritmo de la proporción del lado derecho se conoce como la proporción log-odds. Por lo tanto, si se considera la función de minimización en Ecuación (5.4) como la aproximación empírica del valor medio en Ecuación (5.8), se justifica plenamente considerar el signo de la función en Ecuación (5.2) como regla de clasificación.
Un problema importante asociado a la función de pérdida exponencial, como se ve fácilmente en la Fig. 5.6, es que pondera en gran medida las muestras clasificadas erróneamente, dependiendo del valor del margen respectivo, definido como
Tenga en cuenta que cuanto más lejos esté el punto de la superficie de decisión (\(F(x) = 0\)), mayor será el valor de \(|F(x)|\). Por lo tanto, los puntos que se encuentran en el lado equivocado de la superficie de decisión (\(yF(x) < 0\)) y lejos son (exponencialmente) grandes, y su influencia en el proceso de optimización es grande en comparación con los demás puntos. Así pues, en presencia de valores atípicos, la pérdida exponencial no es la más adecuada. De hecho, en tales entornos, el rendimiento de AdaBoost puede degradarse drásticamente.
Una función de pérdida alternativa es la log-loss o desviación binomial (ver Figura Fig. 5.6), definida como
Nótese que su incremento es casi lineal para valores negativos grandes. Tal función conduce a una influencia más equilibrada de la pérdida entre todos los puntos. Observe además que la función que minimiza la media de la pérdida logarítmica, con respecto a \(y\), es la misma que la dada en Ecuación (5.9) (verifíquelo). Sin embargo, si se emplea la pérdida logarítmica en lugar de la exponencial, la tarea de optimización es más compleja, y hay que recurrir a esquemas de optimización de tipo gradiente descendiente o esquemas de optimización de tipo Newton (ver [Friedman, 2001]).
5.5. Arboles Boosting#
Observation 5.3
En la discusión sobre la comparación experimental de varios métodos, se afirmó que los árboles boosting se encuentran entre los esquemas de aprendizaje más potentes para la clasificación y la minería de datos. Por lo tanto, merece la pena dedicar más tiempo a este tipo especial de técnicas de boosting.
A partir de los conocimientos adquiridos hasta ahora, no es difícil ver que la salida de un árbol puede escribirse de forma compacta como
\[ T(\boldsymbol{x}, \boldsymbol{\Theta})=\sum_{j=1}^{J}\hat{y}_{j}\chi_{R_{j}}(\boldsymbol{x}), \]donde \(J\) es el número de nodos hoja, \(R_{j}\) es la región asociada a la hoja \(j\) tras la partición espacial impuesta por el árbol, \(\hat{y}_{j}\) es la etiqueta respectiva asociada a \(R_{j}\) (valor de salida/predicción para la regresión), y \(\chi\) es nuestra conocida función característica.
El conjunto de parámetros, \(\boldsymbol{\Theta}\), se compone de \((\hat{y}_{j}, R_{j} ), j = 1, 2,\dots, J\), que se estiman durante el entrenamiento. Estos se pueden obtener mediante la selección de una función de coste adecuada. También se suelen emplear técnicas subóptimas, para construir un árbol, como las analizadas en la primera sección.
En un modelo de árbol boosting, el clasificador base está formado por un árbol. En la práctica, se pueden emplear árboles cuyo tamaño (la profundidad máxima es la mayor longitud posible entre la raíz y una hoja) no debe ser muy grande, para acercarse más a un clasificador débil. Normalmente, valores de \(J\) entre 4 y 8 son aconsejables. El modelo de árbol boosting puede escribirse como
La Ecuación (5.10) es básicamente la misma que Ecuación (5.3), con el coeficiente \(a_{k}\) igual a uno. Hemos supuesto que el tamaño de todos los árboles es el mismo, aunque no tiene por qué ser así. Adoptando una función de pérdida \(\mathcal{L}\) y la lógica greedy utilizada para el enfoque boosting más general, llegamos al siguiente esquema recursivo de optimización:
La optimización con respecto a \(\boldsymbol{\Theta}\) tiene lugar en dos pasos: uno con respecto a \(\hat{y}_{ij},~j=1,2,\dots,J\), dado \(R_{ij}\) , y luego uno con respecto a las regiones \(R_{ij}\). Esta última es una tarea difícil y solo se simplifica en casos muy especiales. En la práctica, se pueden emplear varias aproximaciones. Nótese que en el caso de la pérdida exponencial y la tarea de clasificación de dos clases, lo anterior está directamente relacionado con el esquema AdaBoost.
En Python el modelo XGBoost (Adaboost regularizado) se considera como la suma de todos los errores divididos por el número de muestras, y permite elegir distintas funciones de pérdida según la tarea de aprendizaje:
binary:logistic: \(y \cdot \log(\tilde{y}) + (1-y)\cdot\log(1-\tilde{y})\)reg:logistic:\((y - \tilde{y})^2\)Para clasificación múltiple:
multi:softmax,multi:softprob. A continuación vamos a centrarnos en la función de pérdida binary:logistic, que corresponde a la entropía cruzada binaria, muy usada en problemas de clasificación.
La función de pérdida de entropía cruzada (cross-entropy loss) se utiliza para medir la diferencia entre las etiquetas reales y las probabilidades predichas por el modelo. Su definición en clasificación binaria es:
(5.12)#\[ \text{Loss} = -\Big[ y_{\text{real}} \cdot \log(\hat{y}) + (1-y_{\text{real}})\cdot \log(1-\hat{y}) \Big] \]donde:
\(y_{\text{real}} \in \{0,1\}\) es la etiqueta verdadera.
\(\hat{y}\) es la probabilidad predicha por el modelo de que la clase sea positiva (clase = 1).
Si \(y_{\text{real}} = 1\), solo se activa el primer término: \(\text{Loss} = -\log(\hat{y})\) y si \(y_{\text{real}} = 0\), solo se activa el segundo término: \(\text{Loss} = -\log(1-\hat{y})\). De este modo, la etiqueta 0 o 1 actúa como un interruptor que selecciona la parte relevante de la pérdida.
Ejemplo 1: Clase real = 1 (positiva). Supongamos que la etiqueta verdadera es \(y_{\text{real}} = 1\).
Caso A: El modelo predice bien. Si \(\hat{y} = 0.8\):
\[ \text{Loss} = -\big[1 \cdot \log(0.8) + 0 \cdot \log(1-0.8)\big] \]\[ \text{Loss} = -\log(0.8) \approx 0.223 \]El modelo acierta con alta probabilidad, la pérdida es baja.
Caso B: El modelo está inseguro. Si \(\hat{y} = 0.5\):
\[ \text{Loss} = -\log(0.5) \approx 0.693 \]El modelo no se decide, la pérdida es intermedia.
Caso C: El modelo se equivoca. Si \(\hat{y} = 0.1\):
\[ \text{Loss} = -\log(0.1) \approx 2.302 \]El modelo falla gravemente, la pérdida es muy alta.
Ejemplo 2: Clase real = 0 (negativa). Ahora la etiqueta verdadera es \(y_{\text{real}} = 0\).
Caso A: El modelo predice bien. Si \(\hat{y} = 0.1\):
\[ \text{Loss} = -\big[0 \cdot \log(0.1) + 1 \cdot \log(1-0.1)\big] \]\[ \text{Loss} = -\log(0.9) \approx 0.105 \]El modelo acierta, la pérdida es baja.
Caso B: El modelo está inseguro. Si \(\hat{y} = 0.5\):
\[ \text{Loss} = -\log(1-0.5) \approx 0.693 \]El modelo duda, la pérdida es intermedia.
Caso C: El modelo se equivoca. Si \(\hat{y} = 0.9\):
\[ \text{Loss} = -\log(1-0.9) = -\log(0.1) \approx 2.302 \]El modelo falla con mucha seguridad, la pérdida es muy alta.
De esta forma, la entropía cruzada penaliza más fuerte los errores cuando el modelo está seguro de una predicción incorrecta, lo que incentiva al modelo a mejorar su calibración de probabilidades.
Para casos más generales, se recurre a esquemas de optimización numérica. El mismo razonamiento se aplica a los árboles de regresión, donde ahora se utilizan funciones de pérdida para la regresión, como el error al cuadrado o el valor de error absoluto. Estos esquemas también se conocen como árboles de regresión aditiva múltiple (MART).
Hay dos factores críticos en relación con los árboles boosting. Uno es el tamaño de los árboles, \(J\), y el otro es la elección de \(K\). En cuanto al tamaño de los árboles, normalmente se prueban diferentes tamaños, \(4\leq J \leq 8\), y se selecciona el mejor. Con respecto al número de iteraciones, para valores grandes, el error de entrenamiento puede llegar a ser cercano a cero, pero el error de prueba puede aumentar debido al sobreajuste. Por lo tanto, hay que parar lo suficientemente pronto, normalmente controlando el rendimiento.
Otra forma de hacer frente al sobreajuste es emplear métodos de contracción (shrinkage), que suelen ser equivalentes a la regularización. Por ejemplo, en la expansión por etapas de \(F_{i}(x)\) utilizada en el paso de optimización Eq (5.11), se puede adoptar lo siguiente:
El parámetro \(\nu\) toma valores pequeños y puede considerarse que controla la tasa de aprendizaje del procedimiento boosting. Se aconsejan valores inferiores a \(\nu < 0.1\). Sin embargo, cuanto menor sea el valor de \(\nu\), mayor deberá ser el valor de \(K\) para garantizar un buen rendimiento.
5.6. Ejercicios para el estudiante#
Considere el cociente de Rayleigh,
\[ R = \frac{\theta^T A \theta}{\|\theta\|^2} \]donde \(A\) es una matriz simétrica definida positiva. Demuestre que \(R\) se maximiza con respecto a \(\theta\) si \(\theta\) es el autovector correspondiente al mayor autovalor de \(A\).
Considere el cociente de Rayleigh generalizado,
\[ R_g = \frac{\theta^T B \theta}{\theta^T A \theta} \]donde \(A\) y \(B\) son matrices simétricas definidas positivas. Demuestre que \(R_g\) se maximiza con respecto a \(\theta\) si \(\theta\) es el autovector correspondiente al mayor autovalor de \(A^{-1}B\), suponiendo que la inversión de \(A\) es posible.
Derive la regla de la media aritmética para la combinación minimizando la divergencia de Kullback–Leibler promedio.
Derive la regla del promedio geométrico mediante la minimización de la divergencia de Kullback–Leibler.
Demuestre que la tasa de error en el conjunto de entrenamiento del clasificador final, obtenido mediante boosting, tiende a cero de manera exponencialmente rápida.
Tenga en cuenta las siguiente definiciones basadas en entropia
(I) Índice de Gini para una clase en particular:
\[\text{Gini}(p) = 1 - \sum_{i=1}^n p_i^2\]Donde \( p_i\) es la proporción de observaciones de la clase ( i ) en el nodo.
(II) Índice de Gini para una partición (nodo con varias clases):
\[\text{Gini}(\text{Nodo}) = 1 - \sum_{i=1}^C \left( \frac{n_i}{N} \right)^2\]Donde:
\( C \) es el número de clases.
\( n_i \) es el número de observaciones de la clase ( i ) en el nodo.
\(N\) es el número total de observaciones en el nodo.
(III) Ganancia de información para el índice de Gini :
\[\text{Gini}_{\text{split}} = \frac{N_{\text{1}}}{N} \cdot \text{Gini}(\text{Nodo}_{\text{1}}) + \frac{N_{\text{2}}}{N} \cdot \text{Gini}(\text{Nodo}_{\text{2}})\]Donde:
\(\text{Gini}(\text{Nodo}_{\text{1}})\) y \(\text{Gini}(\text{Nodo}_{\text{2}}) \) son los índices de Gini de las diferentes categorías perteneceintes a la clase.
\(N_{\text{1}}\) y \(N_{\text{2}}\) son las cantidades de observaciones de cada categoría.
\(N\) es el número total de observaciones en el nodo padre.
La siguiente tabla muestra 10 observaciones, úsela para predecir si un individuo será astronauta (
Gonna Be an Astronaut, variable binaria). Las variables explicativas sonAge(numérica) yLike Dogs,Like Gravity(binarias).
Age |
Like Dogs |
Like Gravity |
Gonna Be an Astronaut |
|---|---|---|---|
24 |
0 |
0 |
0 |
30 |
1 |
1 |
1 |
36 |
0 |
1 |
1 |
36 |
0 |
0 |
0 |
42 |
0 |
0 |
0 |
44 |
1 |
1 |
1 |
46 |
1 |
0 |
0 |
47 |
1 |
1 |
1 |
47 |
0 |
1 |
1 |
51 |
1 |
1 |
0 |
5.7. Implementación#
5.8. Control de complejidad#
Al construir un árbol hasta que todas las hojas sean puras, se obtienen modelos complejos y ajustados al conjunto de entrenamiento, lo que resulta en un 100% de precisión. Para evitar el overfitting, se pueden emplear dos estrategias: la prepoda, que detiene la creación del árbol antes de tiempo, o la poda posterior, que elimina nodos poco informativos. La prepoda puede incluir limitar la profundidad del árbol, el número máximo de hojas o exigir un mínimo de puntos en un nodo para seguir dividiéndolo.
En
scikit-learn, los árboles de decisión se implementan en las clasesDecisionTreeRegressoryDecisionTreeClassifier, y solo se ofrece la prepoda. Para ilustrar el efecto de esta técnica, se utiliza el conjunto de datosbreast_cancer, que se divide en partes de entrenamiento y prueba. Se construye un modelo con la configuración por defecto, extendiendo el árbol hasta que todas las hojas sean puras, estableciendo unrandom_statepara la separación de datos y usandostratify=cancer.targetpara una división estratificada.
from sklearn.tree import DecisionTreeClassifier
from sklearn.datasets import load_breast_cancer
from sklearn.model_selection import train_test_split
cancer = load_breast_cancer()
X_train, X_test, y_train, y_test = train_test_split(cancer.data, cancer.target,
stratify=cancer.target,
random_state=42)
tree = DecisionTreeClassifier(random_state=0)
tree.fit(X_train, y_train)
print("Accuracy on training set: {:.3f}".format(tree.score(X_train, y_train)))
print("Accuracy on test set: {:.3f}".format(tree.score(X_test, y_test)))
Accuracy on training set: 1.000
Accuracy on test set: 0.937
Aquí la función
scorecomo en la mayoría de clasificadores, devuelve la precisión media en los datos de prueba y las etiquetas dadas. Como era de esperar, la precisión en el conjunto de entrenamiento es del 100%, ya que las hojas son puras, el árbol creció lo suficiente como para poder memorizar perfectamente todas las etiquetas de los datos de entrenamiento. La precisión del conjunto de prueba es ligeramente peor que la de los modelos lineales que vimos anteriormente, que tenían una precisión de alrededor del 95%.Si no restringimos la profundidad de un árbol de decisión, el árbol puede llegar a ser arbitrariamente profundo y complejo. Los árboles no podados son por tanto, propensos a sobreajustarse y a no generalizar bien a los nuevos datos. Ahora apliquemos la pre-poda, la cual que dejará de desarrollar el árbol antes de ajustarse perfectamente a los datos de entrenamiento. Una opción es dejar de construir el árbol después de alcanzar una cierta profundidad. En este caso,establecemos que la profundidad máxima sea de 4 (
max_depth=4), lo que significa que sólo se pueden formular cuatro preguntas consecutivas. La limitación de la profundidad del árbol disminuye el sobreajuste.
tree = DecisionTreeClassifier(max_depth=4, random_state=0)
tree.fit(X_train, y_train)
print("Accuracy on training set: {:.3f}".format(tree.score(X_train, y_train)))
print("Accuracy on test set: {:.3f}".format(tree.score(X_test, y_test)))
Accuracy on training set: 0.988
Accuracy on test set: 0.951
5.9. Análisis de los árboles de decisión#
Podemos visualizar un árbol de decisión con la función
export_graphvizdel módulotree, que genera un archivo en formato.dotpara gráficos. Configuramos la opción de colorear los nodos según la clase mayoritaria y proporcionamos nombres de clases y características para etiquetar el árbol correctamente. El argumentoimpurityse relaciona con la probabilidad de clasificar incorrectamente un nuevo dato, calculada normalmente mediante la métrica de entropía de Gini, discutida en la sección anterior.
from sklearn.tree import export_graphviz
export_graphviz(tree,
out_file="tree.dot",
class_names=["malignant", "benign"],
feature_names=cancer.feature_names,
impurity=False,
filled=True)
Podemos leer este archivo y visualizarlo, utilizando el modulo
graphviz(o puede utilizar cualquier programa que pueda leer archivos.dot). Para que funcioneGraphvizdeberá además realizar la siguiente instalación, la cual es la única dependencia (ver Graphviz Instalación). Además debe ejecutar en su consolapip install graphviz
import graphviz
with open("tree.dot") as f:
dot_graph = f.read()
graph = graphviz.Source(dot_graph)
graphviz.Source(dot_graph)

La visualización del árbol ofrece una comprensión profunda de las predicciones del algoritmo y es un buen ejemplo para explicar a no expertos. Sin embargo, un árbol de profundidad cuatro puede ser abrumador, y los de mayor profundidad (como uno de diez) son aún más complejos. Un método útil para inspeccionar el árbol es analizar el camino que siguen la mayoría de los datos.
En cada nodo, el número de muestras y su clasificación se muestran, como en el caso del nodo donde un
"worst radius"de 16.795 resulta en 8 muestras benignas y 134 malignas. La mayoría de las 142 muestras que van hacia la derecha terminan en la hoja derecha. Al ir a la izquierda, con un"worst radius"mayor a 16.795, encontramos 25 muestras malignas y 259 benignas; casi todas las benignas terminan en la segunda hoja a la derecha, mientras que otras hojas contienen muy pocas muestras.
5.10. Características importantes en los árboles#
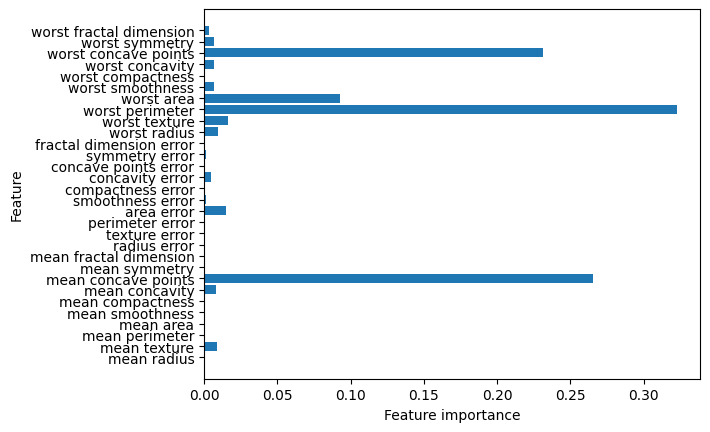
En lugar de mirar todo el árbol, lo que puede ser agotador, hay algunas propiedades útiles que podemos derivar para resumir el funcionamiento del árbol. El resumen más utilizado es el de las características importantes, que califica la importancia de cada característica para la decisión que toma el árbol. Es un número entre 0 y 1 para cada característica, donde 0 significa “no se utiliza en absoluto” y 1 significa “predice perfectamente el objetivo”. Las características siempre suman 1
Otra excelente manera de visualizar predicciones a partir de un random forest por ejemplo, es utilizando la librería LIME de Python. Con esta librería se pueden generar por cada instancia, figuras de cartaterísticas importantes y representar sus probabilidades de pertenecer a la clase predicha (pruebela en este ejemplo). Para instalarla solo debe usar
pip install lime
Procedemos a explorar la visualización de
feature_importances_
print("Feature importances:\n{}".format(tree.feature_importances_))
Feature importances:
[0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0.01019737 0.04839825
0. 0. 0.0024156 0. 0. 0.
0. 0. 0.72682851 0.0458159 0. 0.
0.0141577 0. 0.018188 0.1221132 0.01188548 0. ]
Podemos visualizar las importancias de las características de forma similar a la forma en que visualizamos los coeficientes en el modelo lineal
import matplotlib.pyplot as plt
import numpy as np
def plot_feature_importances_cancer(model):
n_features = cancer.data.shape[1]
plt.barh(range(n_features), model.feature_importances_, align='center')
plt.yticks(np.arange(n_features), cancer.feature_names)
plt.xlabel("Feature importance")
plt.ylabel("Feature")
plot_feature_importances_cancer(tree)
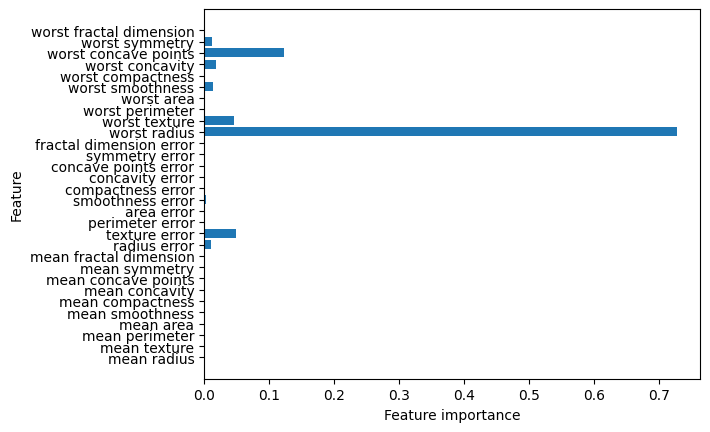
La característica
"worst radio"es la más importante en la división superior, lo que confirma que el primer nivel del árbol separa bien las dos clases. Sin embargo, un bajo valor de importancia de una característica no indica que sea poco informativa, sino que podría estar codificada por otra característica. Un valor negativo de importancia sugiere que la característica aumenta la pérdida, lo que puede indicar un mal ajuste del modelo o que la característica no es útil, y podría ser eliminada para mejorar el rendimiento.A diferencia de los coeficientes en modelos lineales, las importancias de las características son siempre positivas y no indican la clase que representa. Así, aunque
"worst radio"es importante, no especifica si un valor alto sugiere benignidad o malignidad. Además, la relación entre características y clase no siempre es sencilla, como se muestra en un ejemplo donde una característica tiene una relación no monótona con la etiqueta de clase¨.
import mglearn
tree = mglearn.plots.plot_tree_not_monotone()
display(tree)
Feature importances: [0. 1.]

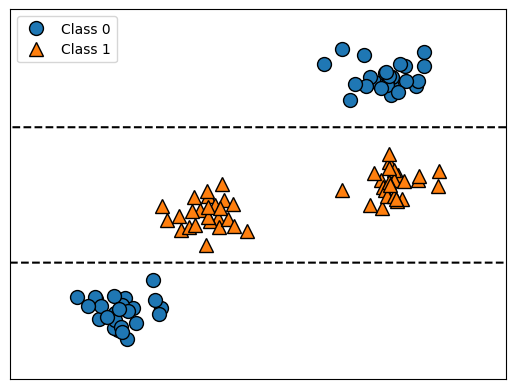
El gráfico muestra un conjunto de datos con dos características y dos clases. Aquí, toda la información está contenida en
X[1], yX[0]no se utiliza en absoluto. Pero la relación entre X[1] y la clase de salida no es monótona, lo que significa que no podemos decir “un valor alto de X[0] significa la clase 0, y un valor bajo significa la clase 1” (o viceversa). Aunque hemos centrado nuestra discusión aquí en los árboles de decisión para la clasificación, todo lo que se ha dicho es igualmente cierto para los árboles de decisión para la regresión, como se implementa enDecisionTreeRegressor.El uso y análisis de los árboles de regresión es muy similar al de los árboles de clasificación. Hay una propiedad particular del uso de modelos basados en árboles para regresión que queremos señalar, sin embargo, DecisionTreeRegressor (y todos los otros modelos de regresión basados en árboles) no son capaces de extrapolar, o hacer predicciones fuera del rango de los datos de entrenamiento. Veamos esto con más detalle, utilizando un conjunto de datos de los precios históricos de la memoria de los ordenadores (RAM). La siguiente figura muestra el conjunto de datos, con la fecha en el eje \(x\) y el precio de un megabyte de RAM en ese año en el eje \(y\):
import pandas as pd
ram_prices = pd.read_csv("https://raw.githubusercontent.com/lihkir/Data/main/ram_price.csv")
plt.semilogy(ram_prices.date, ram_prices.price);
plt.xlabel("Year");
plt.ylabel("Price in $/Mbyte");
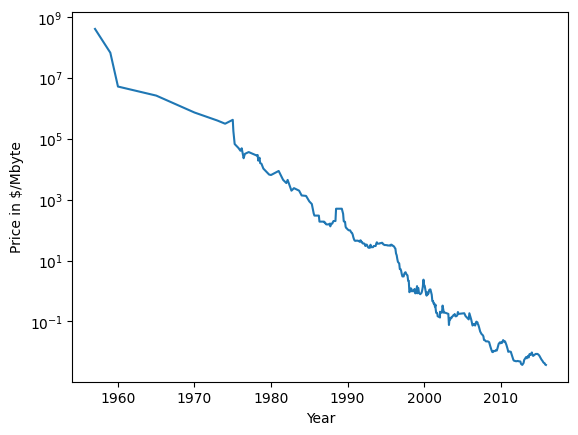
Nótese que en la escala logarítmica del eje \(y\), la relación parece ser bastante lineal y, por tanto, debería ser relativamente fácil de predecir. Vamos a hacer una predicción para los años posteriores al 2000 utilizando los datos históricos hasta esa fecha como única característica. Compararemos dos modelos sencillos: un
DecisionTreeRegressoryLinearRegression.Cambiamos la escala de los precios utilizando un logaritmo, para que la relación sea relativamente lineal. Esto no supone ninguna diferencia para el
DecisionTreeRegressor, pero supone una gran diferencia para elLinearRegression. Después de entrenar los modelos y hacer predicciones, aplicamos la función exponencial para deshacer la transformación del logaritmo. Realizamos predicciones sobre todo el conjunto de datos para su visualización, pero para una evaluación cuantitativa, sólo consideraríamos el conjunto de datos de prueba
from sklearn.tree import DecisionTreeRegressor
from sklearn.linear_model import LinearRegression
Utilizamos los datos históricos para prever los precios después del año 2000. Realizamos predicción de los precios en función de la fecha. Utilizamos una transformación logarítmica para obtener una relación más sencilla de los datos con el objetivo
data_train = ram_prices[ram_prices.date < 2000]
data_test = ram_prices[ram_prices.date >= 2000]
X_train = np.array(data_train.date)[:, None] # Vector columna
y_train = np.log(data_train.price)
tree = DecisionTreeRegressor().fit(X_train, y_train)
linear_reg = LinearRegression().fit(X_train, y_train)
X_all = np.array(ram_prices.date)[:, None]
pred_tree = tree.predict(X_all)
pred_lr = linear_reg.predict(X_all)
price_tree = np.exp(pred_tree)
price_lr = np.exp(pred_lr)
Realizamos una figura para comparar las predicciones del árbol de decisión y del modelo de regresión lineal con la los datos reales de entrenamiento y de prueba
plt.semilogy(data_train.date, data_train.price, label="Training data")
plt.semilogy(data_test.date, data_test.price, label="Test data")
plt.semilogy(ram_prices.date, price_tree, label="Tree prediction")
plt.semilogy(ram_prices.date, price_lr, label="Linear prediction")
plt.legend();
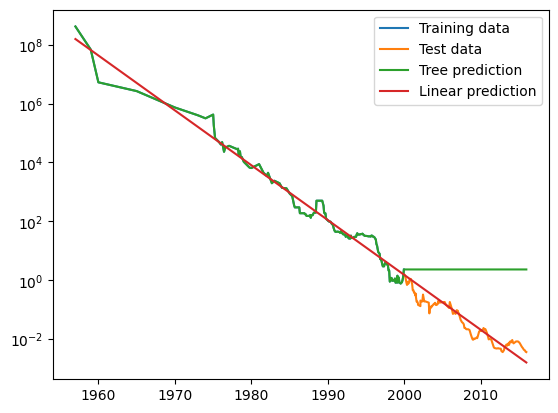
La diferencia entre los modelos es bastante sorprendente. El modelo lineal se aproxima a los datos con una línea, como sabíamos que haría. Esta línea proporciona una previsión bastante buena para los datos de prueba (los años posteriores al 2000), mientras que pasa por alto algunas de las variaciones más finas en los datos de entrenamiento y de prueba. El modelo de árbol, por su parte, hace predicciones perfectas sobre los datos de entrenamiento, no restringimos la complejidad del árbol, por lo que aprendió de memoria todo el conjunto de datos. Sin embargo, una vez que salimos del rango para el que el arbol tiene datos, el modelo simplemente sigue prediciendo el último punto conocido. El árbol no tiene la capacidad para generar “nuevas” respuestas, fuera de lo que se vio en los datos de de entrenamiento. Esta deficiencia se aplica a todos los modelos basados en árboles.
Puntos fuertes, puntos débiles y parámetros
Los parámetros de pre-selección en los árboles de decisión controlan la complejidad del modelo y evitan el sobreajuste deteniendo su construcción prematuramente. Configurar adecuadamente parámetros como
max_depth, max_leaf_nodesymin_samples_leafes crucial.Los árboles de decisión tienen ventajas significativas: su modelo es fácilmente visualizable y comprensible para personas no expertas, y son invariables a la escala de los datos, eliminando la necesidad de normalización o estandarización. Funcionan bien con características de escalas diferentes y combinaciones de variables binarias y continuas.
Sin embargo, su principal desventaja es la tendencia al sobreajuste, lo que afecta su rendimiento de generalización. Por ello, se prefieren métodos combinados en la mayoría de las aplicaciones en lugar de usar un único árbol de decisión.
5.11. Ensamble de árboles de decisión#
Los ensambles son métodos que combinan múltiples modelos de aprendizaje automático para crear modelos más potentes. Hay muchos modelos en la literatura de aprendizaje automático que pertenecen a esta categoría, pero hay dos modelos de ensamble que han demostrado su eficacia en una amplia gama de conjuntos de datos de clasificación y regresión, ambos utilizan árboles de decisión como bloques de construcción: los
random foresty losgradient boosted decision trees.
Bosques aleatorios
Uno de los principales inconvenientes de los árboles de decisión es su tendencia al sobreajuste. Los bosques aleatorios abordan este problema al combinar múltiples árboles de decisión, cada uno ligeramente diferente. Aunque cada árbol predice razonablemente, tiende a ajustarse demasiado a los datos de manera particular. Al promediar los resultados de muchos árboles, podemos reducir el sobreajuste mientras mantenemos el poder predictivo. Para implementar esta estrategia, es necesario construir múltiples árboles que sean efectivos y distintos. La aleatorización se logra al seleccionar diferentes puntos de datos y características para cada árbol.
Construcción de bosques aleatorios
Para construir un modelo de bosque aleatorio, se debe definir el número de árboles (parámetro
n_estimators). Supongamos que queremos construir 10 árboles, los cuales se crearán de manera independiente con elecciones aleatorias para asegurar su diversidad.Cada árbol se construye a partir de una muestra bootstrap, que se obtiene seleccionando repetidamente ejemplos al azar con reemplazo de los datos originales. Esto resulta en un conjunto de datos del mismo tamaño que el original, pero con algunos puntos faltantes y otros repetidos.
Por ejemplo, para la lista
[‘a’, ‘b’, ‘c’, ‘d’], una muestra bootstrap podría ser[‘b’, ‘d’, ‘d’, ‘c’]. Luego, se construye un árbol de decisión basado en esta muestra. El algoritmo se modifica para seleccionar aleatoriamente un subconjunto de características en cada nodo, controlado por el parámetromax_features. Esto asegura que cada árbol sea diferente, ya que cada nodo puede usar diferentes características.El parámetro
max_featureses crucial: si se establece enn_features, cada división puede evaluar todas las características, reduciendo la aleatoriedad. Si se fija en 1, cada división solo considera la característica seleccionada aleatoriamente, resultando en árboles más similares. Unmax_featuresbajo genera árboles más diversos, que pueden necesitar ser más profundos para ajustarse bien a los datos.Para hacer una predicción con el bosque aleatorio, se obtiene una predicción de cada árbol. En regresión, se promedian estas predicciones; en clasificación, se utiliza una “votación suave”, promediando las probabilidades de cada etiqueta y eligiendo la clase con la mayor probabilidad.
Análisis de los bosques aleatorios. Apliquemos un bosque aleatorio compuesto por cinco árboles al conjunto de datos two_moons
from sklearn.ensemble import RandomForestClassifier
from sklearn.datasets import make_moons
from sklearn.model_selection import train_test_split
import matplotlib.pyplot as plt
X, y = make_moons(n_samples=100, noise=0.25, random_state=3)
X_train, X_test, y_train, y_test = train_test_split(X, y, stratify=y, random_state=42)
forest = RandomForestClassifier(n_estimators=5, random_state=2)
forest.fit(X_train, y_train)
RandomForestClassifier(n_estimators=5, random_state=2)In a Jupyter environment, please rerun this cell to show the HTML representation or trust the notebook.
On GitHub, the HTML representation is unable to render, please try loading this page with nbviewer.org.
RandomForestClassifier(n_estimators=5, random_state=2)
Los árboles que se construyen como parte del bosque aleatorio se almacenan en estimator_attribute. Visualicemos los límites de decisión aprendidos por cada árbol, junto con su predicción agregada
fig, axes = plt.subplots(2, 3, figsize=(20, 10))
for i, (ax, tree) in enumerate(zip(axes.ravel(), forest.estimators_)):
ax.set_title("Tree {}".format(i))
mglearn.plots.plot_tree_partition(X_train, y_train, tree, ax=ax)
mglearn.plots.plot_2d_separator(forest, X_train, fill=True, ax=axes[-1, -1], alpha=.4)
axes[-1, -1].set_title("Random Forest")
mglearn.discrete_scatter(X_train[:, 0], X_train[:, 1], y_train);
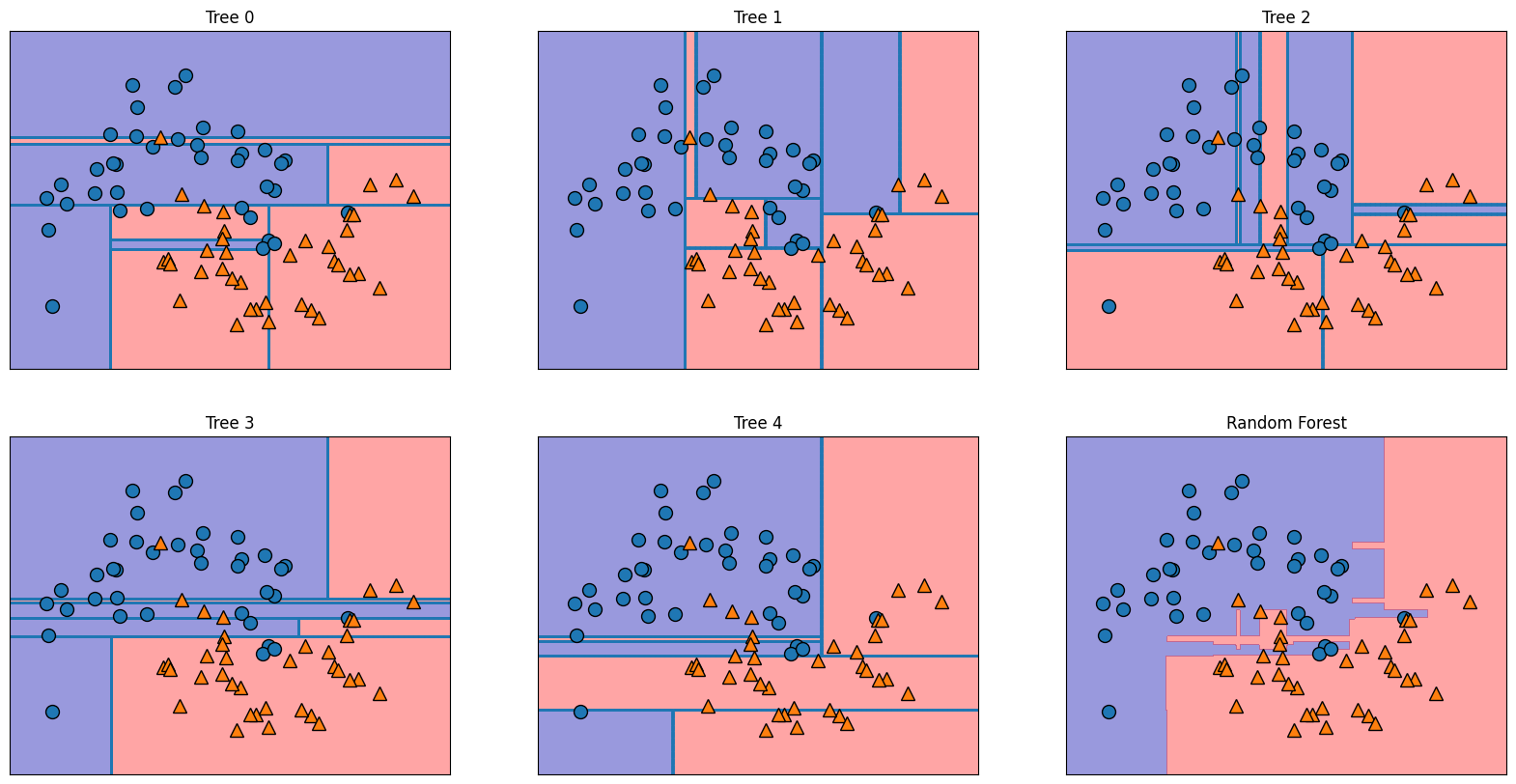
Se puede ver claramente que los límites de decisión aprendidos por los cinco árboles son bastante diferentes. Cada uno de ellos comete algunos errores, ya que algunos de los puntos que se representan aquí no se incluyeron en los conjuntos de entrenamiento de los árboles, debido al muestreo bootstrap. El bosque aleatorio se ajusta menos que cualquiera de los árboles por separado y proporciona un límite de decisión mucho más intuitivo. En cualquier aplicación real, utilizaríamos muchos más árboles (a menudo cientos o miles), lo que daría lugar a límites aún más suaves.
Como otro ejemplo, apliquemos un bosque aleatorio compuesto por 100 árboles en el conjunto de datos Breast Cancer
from sklearn.datasets import load_breast_cancer
cancer = load_breast_cancer()
X_train, X_test, y_train, y_test = train_test_split(cancer.data, cancer.target, random_state=0)
forest = RandomForestClassifier(n_estimators=100, random_state=0)
forest.fit(X_train, y_train)
print("Accuracy on training set: {:.3f}".format(forest.score(X_train, y_train)))
print("Accuracy on test set: {:.3f}".format(forest.score(X_test, y_test)))
Accuracy on training set: 1.000
Accuracy on test set: 0.972
El bosque aleatorio nos da una precisión del 97%, mejor que los modelos lineales o un árbol de decisión único, sin necesidad de ajustar ningún parámetro. Podríamos ajustar la configuración de
max_features, o aplicar la pre-selección como hicimos con el árbol de decisión simple. Sin embargo, a menudo los parámetros por defecto del bosque aleatorio ya funcionan bastante bien. Al igual que el árbol de decisión, el bosque aleatorio proporciona importancias de características, que se calculan agregando las importancias de las características en los árboles del bosque. Normalmente, las importancias de las características proporcionadas por el bosque aleatorio son más fiables que las proporcionadas por un solo árbol.
plot_feature_importances_cancer(forest)
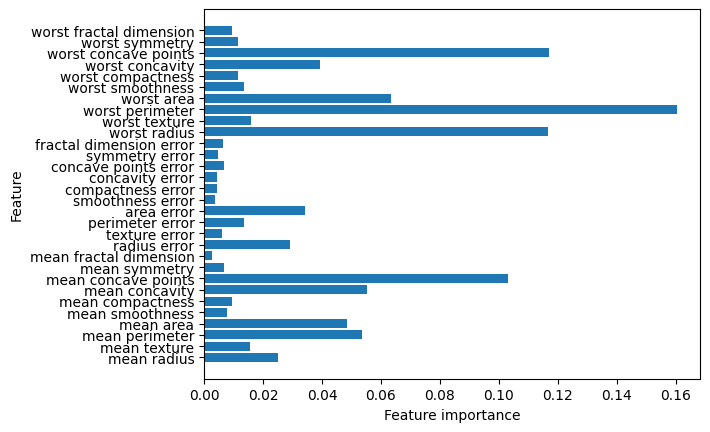
Como puede ver, el bosque aleatorio da una importancia no nula a muchas más características que el árbol simple. Al igual que el árbol de decisión simple, el bosque aleatorio también da importancia a la característica “worst radius”, pero en realidad elige “worst perimeter” como la característica más informativa. La aleatoriedad en la construcción del bosque aleatorio obliga al algoritmo a considerar muchas explicaciones posibles. El resultado es que el bosque aleatorio capta una imagen mucho más amplia de los datos que un árbol simple.
Observación
La importancia de la característica se calcula como la disminución de la impureza del nodo ponderada por la probabilidad de alcanzar ese nodo. La probabilidad del nodo puede calcularse mediante el número de muestras que llegan al nodo, dividido por el número total de muestras. Cuanto mayor sea el valor, más importante será la característica.La impureza de Gini se calcula mediante la formula usada al inicio de esta sección
Puntos fuertes y débiles de los bosques aleatorios
Los bosques aleatorios son métodos populares de aprendizaje automático para regresión y clasificación, conocidos por su eficacia sin requerir ajustes extensos de parámetros y sin necesidad de escalar datos. Aunque comparten las ventajas de los árboles de decisión, son menos interpretables debido a la complejidad de múltiples árboles. Para visualizaciones simples, un árbol de decisión único es preferible.
La construcción de bosques aleatorios en grandes conjuntos de datos puede ser lenta, pero se puede paralelizar utilizando múltiples núcleos de CPU con el parámetro
n_jobs, optimizando la velocidad de entrenamiento. Es importante fijar el parámetrorandom_statepara reproducibilidad, ya que la aleatoriedad puede afectar el modelo. Estos bosques no son efectivos con datos escasos y de alta dimensionalidad, donde los modelos lineales suelen ser más adecuados.Los bosques aleatorios requieren más memoria y tiempo en comparación con los modelos lineales, lo que puede ser un factor limitante. Los parámetros clave a ajustar son
n_estimators,max_features, y potencialmentemax_depth. Un mayor número de árboles mejora la robustez al reducir el sobreajuste, aunque se deben considerar los rendimientos decrecientes en tiempo y memoria. Se recomienda utilizar configuraciones predeterminadas comomax_features=sqrt(n_features)para clasificación ymax_features=log2(n_features)para regresión, con la posibilidad de optimizar aún más el rendimiento mediante ajustes adicionales.
Árboles de regresión de gradiente reforzado (máquinas de gradiente reforzado)
El árbol regresión de gradiente reforzado es un método de conjunto que combina múltiples árboles de decisión para regresión y clasificación. A diferencia de los bosques aleatorios, construye árboles en serie, donde cada árbol corrige los errores del anterior, utilizando una pre-poda fuerte y árboles poco profundos (de una a cinco profundidades) para mejorar la eficiencia y velocidad de las predicciones.
El enfoque se basa en combinar modelos simples (aprendices débiles) para mejorar el rendimiento. Aunque es más sensible a la configuración de parámetros que los bosques aleatorios, puede lograr mayor precisión si se ajustan correctamente. Los parámetros clave incluyen la tasa de aprendizaje, que determina cuán intensamente cada árbol corrige los errores, y el número de árboles en el conjunto (
n_estimators), lo que afecta la complejidad del modelo.
Este es un ejemplo del uso del clasificador
GradientBoostingen el conjunto de datos del Breast Cancer. Por defecto, se utilizan 100 árboles de profundidad máxima 3 y una tasa de aprendizaje de 0.1
from sklearn.ensemble import GradientBoostingClassifier
from sklearn.model_selection import train_test_split
from sklearn.datasets import load_breast_cancer
import matplotlib.pyplot as plt
import numpy as np
cancer = load_breast_cancer()
X_train, X_test, y_train, y_test = train_test_split(cancer.data, cancer.target, random_state=0)
gbrt = GradientBoostingClassifier(random_state=0)
gbrt.fit(X_train, y_train)
print("Accuracy on training set: {:.3f}".format(gbrt.score(X_train, y_train)))
print("Accuracy on test set: {:.3f}".format(gbrt.score(X_test, y_test)))
Accuracy on training set: 1.000
Accuracy on test set: 0.965
Como la precisión del conjunto de entrenamiento es del 100%, es probable que estemos sobreajustando. Para reducir el sobreajuste, podemos aplicar una pre-poda más fuerte limitando la profundidad máxima o reducir la tasa de aprendizaje
gbrt = GradientBoostingClassifier(random_state=0, max_depth=1)
gbrt.fit(X_train, y_train)
print("Accuracy on training set: {:.3f}".format(gbrt.score(X_train, y_train)))
print("Accuracy on test set: {:.3f}".format(gbrt.score(X_test, y_test)))
Accuracy on training set: 0.991
Accuracy on test set: 0.972
gbrt = GradientBoostingClassifier(random_state=0, learning_rate=0.01)
gbrt.fit(X_train, y_train)
print("Accuracy on training set: {:.3f}".format(gbrt.score(X_train, y_train)))
print("Accuracy on test set: {:.3f}".format(gbrt.score(X_test, y_test)))
Accuracy on training set: 0.988
Accuracy on test set: 0.958
Ambos métodos para disminuir la complejidad del modelo redujeron la precisión del conjunto de entrenamiento, como era de esperar. En este caso, la reducción de la profundidad máxima de los árboles proporcionó una mejora significativa del modelo, mientras que la reducción de la tasa de aprendizaje sólo aumentó la precisión del conjunto de entrenamiento ligeramente. En cuanto a los otros modelos basados en árboles de decisión, podemos volver a visualizar las características para obtener más información sobre nuestro modelo. Como utilizamos 100 árboles, es poco práctico inspeccionarlos todos, aunque todos tengan una profundidad de 1.
gbrt = GradientBoostingClassifier(random_state=0, max_depth=1)
gbrt.fit(X_train, y_train)
plot_feature_importances_cancer(gbrt)
Podemos ver que las importancias de las características de los árboles
gradient-boostson algo similares a las de los bosques aleatorios, aunque el refuerzo del gradiente ignora por completo algunas de las características. Como tanto el refuerzo de gradiente como los bosques aleatorios funcionan bien en tipos de datos similares, un enfoque común es probar primero los bosques aleatorios, que funcionan con bastante solidez. Si los bosques aleatorios funcionan bien, pero el tiempo de predicción es un problema, o si es importante exprimir el último porcentaje de precisión del modelo de aprendizaje automático, pasar a la refuerzo por gradiente suele ser útil.Si quiere aplicar el refuerzo de gradiente a un problema a gran escala, puede que merezca la pena investigar el paquete xgboost y su interfaz de Python, que hasta el momento es más rápido (y a veces más fácil de usar) que la implementación de scikit-learn en muchos conjuntos de datos.
import lime
import lime.lime_tabular
Creamos un objeto
LimeTabularExplainerde la bibliotecaLIMEpara explicar predicciones de un modelo de clasificación basado en datos tabulares. Este objeto es esencial para generar explicaciones locales de cómo el modelo toma decisiones en una instancia específica
explainer = lime.lime_tabular.LimeTabularExplainer(
training_data=X_train,
feature_names=cancer.feature_names,
class_names=cancer.target_names,
mode='classification'
)
Seleccionamos una instancia específica del conjunto de prueba (
X_test) y preparándola para que el modelo la utilice en una predicción
i = 100
instance = X_test[i].reshape(1, -1)
Las siguientes líneas de código utilizan
LIME (Local Interpretable Model-agnostic Explanations)para explicar las predicciones del modeloGradient Boosting Classifier
exp = explainer.explain_instance(
data_row=X_test[i], # Punto de datos a explicar
predict_fn=gbrt.predict_proba # Función de predicción del modelo
)
exp.show_in_notebook(show_table=True, show_all=False)se encarga de mostrar los resultados de la explicación generada por el explainer
exp.show_in_notebook(show_table=True, show_all=False)
exp.as_pyplot_figure()genera una figura que visualiza la explicación de las predicciones en un formato compatible conMatplotlib.
exp.as_pyplot_figure()
plt.show()
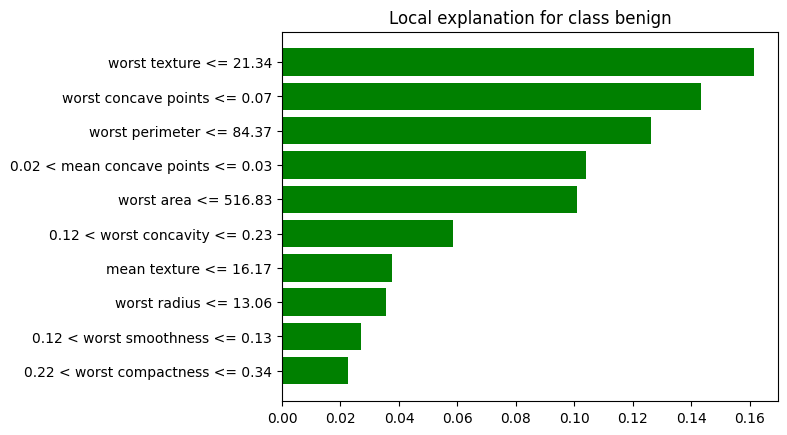
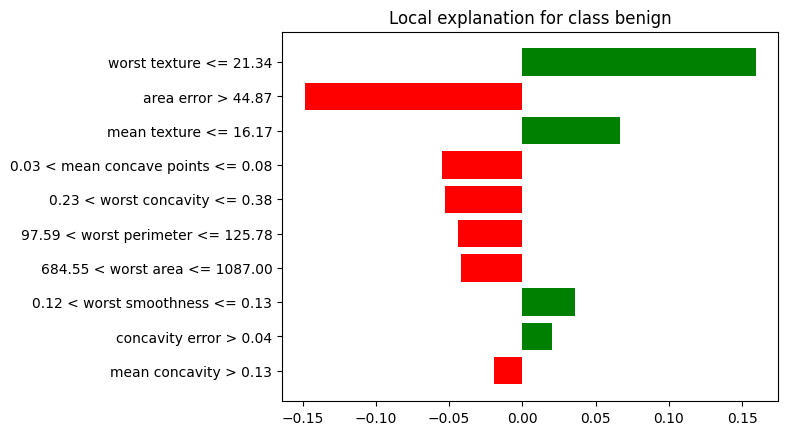
Los siguientes son los significados de cada color mostrado en cada barra, el cual también está relacioando con la entropía. A continuación, se agrega otro ejemplo, el cual considera explicabilidad para la observbación ì=10
Barras verdes: Las características están favoreciendo la clase predicha (por ejemplo, “benign”).Barras rojas: Las características están empujando hacia la clase opuesta (por ejemplo, “malignant”).La longitud de las barrasrepresenta la importancia de cada característica en la predicción, medida a través de su impacto en la entropía de las predicciones.Prediction probabilitiesrepresenta la probabilidad de que el modelo prediga una determinada clase o resultado para un dato específico.
i = 10
instance = X_test[i].reshape(1, -1)
exp = explainer.explain_instance(
data_row=X_test[i], # Punto de datos a explicar
predict_fn=gbrt.predict_proba # Función de predicción del modelo
)
exp.show_in_notebook(show_table=True, show_all=False)
exp.as_pyplot_figure()
plt.show()
En resumen,
LIMEes una herramienta valiosa para aumentar la interpretabilidad y la confianza en modelos de aprendizaje automático, permitiendo a los usuarios comprender y validar las decisiones de los modelos de manera efectiva.
Si deseas mayor capacidad de cómputo, para realizar por ejemplo una validación cruzada, puedes utilizar XGBoost GPU Support. Antés, debes seguir la guía de instalación ( ver Installation Guide) y además, verificar que tiene instalado CUDA. Una vez instalado, puedes proceder a utilizar
XGBoost, habilitando el soporte para GPU con el parámetrotree_method='gpu_hist'.
import warnings
warnings.filterwarnings('ignore')
import mglearn
import matplotlib
import xgboost as xgb
from sklearn.datasets import load_breast_cancer
from sklearn.model_selection import train_test_split, GridSearchCV
import time
import os
import joblib
cancer = load_breast_cancer()
X_train, X_test, y_train, y_test = train_test_split(cancer.data, cancer.target, random_state=0)
Confirmamos que el modelo está configurado para usar GPU
model = xgb.XGBClassifier(tree_method='gpu_hist', use_label_encoder=False, verbosity=2)
print("Modelo configurado con tree_method='gpu_hist'")
Modelo configurado con tree_method='gpu_hist'
params = {
'max_depth': [3, 4, 5, 6, 7], # Rango para la profundidad del árbol
'learning_rate': [0.1, 0.2, 0.3], # Rango para la tasa de aprendizaje
'n_estimators': [100, 200, 300], # Número de árboles a entrenar
}
grid_search = GridSearchCV(model, params, scoring='roc_auc', cv=5, verbose=1)
model_filename = 'best_xgboost_model.pkl'
model = None
if os.path.exists(model_filename):
print(f"El modelo ya existe. Cargando desde {model_filename}...")
model = joblib.load(model_filename)
else:
print("El modelo no existe. Entrenando un nuevo modelo...")
start_time = time.time()
grid_search.fit(X_train, y_train)
end_time = time.time()
elapsed_time = end_time - start_time
print("Mejores parámetros:", grid_search.best_params_)
print("Mejor AUC en prueba:", grid_search.best_score_)
print(f"Tiempo de cómputo: {elapsed_time:.2f} segundos")
joblib.dump(grid_search.best_estimator_, model_filename)
print(f"Modelo guardado como {model_filename}")
model = grid_search.best_estimator_
El modelo no existe. Entrenando un nuevo modelo...
Fitting 5 folds for each of 45 candidates, totalling 225 fits
Mejores parámetros: {'learning_rate': 0.2, 'max_depth': 5, 'n_estimators': 200}
Mejor AUC en prueba: 0.991728305831699
Tiempo de cómputo: 79.94 segundos
Modelo guardado como best_xgboost_model.pkl
model_params = {key: value for key, value in model.get_params().items() if value is not None}
print("Parámetros del modelo:", model_params)
Parámetros del modelo: {'objective': 'binary:logistic', 'enable_categorical': False, 'learning_rate': 0.2, 'max_depth': 5, 'missing': nan, 'n_estimators': 200, 'tree_method': 'gpu_hist', 'verbosity': 2, 'use_label_encoder': False}
Para estar completamente seguro que utilizó su GPU durante la fase de entrenamiento, puede verificar que este dispositivo dedicado se encuentra activo en su administrador de tareas
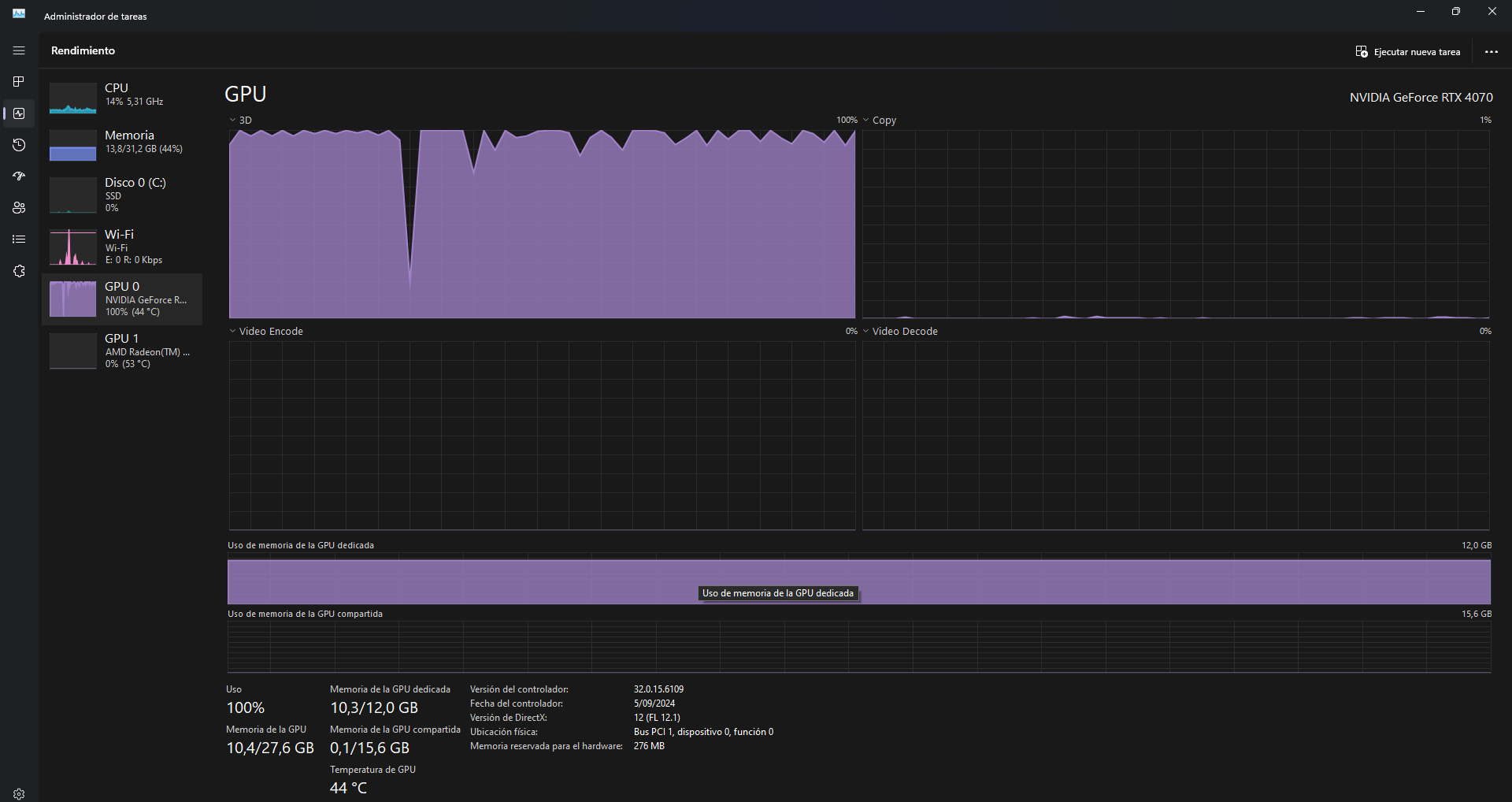
Fig. 5.7 Uso de GPU durante la fase de entrenamiento usando XGBoost GPU Support.#
Puntos fuertes, puntos débiles y parámetros
Los árboles de decisión con refuerzo de gradiente se encuentran entre los modelos más potentes y utilizados para el aprendizaje supervisado. Su principal inconveniente es que requieren un ajuste cuidadoso de los parámetros y pueden tardar mucho tiempo de entrenamiento. Al igual que otros modelos basados en árboles, el algoritmo funciona bien sin escalar y con una mezcla de características binarias y continuas. Al igual que otros modelos basados en árboles tampoco suele funcionar bien con datos dispersos de alta dimensión.
Los principales parámetros de los modelos de árbol de gradiente reforzado son el número de árboles,
n_estimators, y ellearning_rateque controla el grado en que cada árbol puede corregir los errores de los árboles anteriores. Estos dos parámetros están muy interconectados, ya que una tasa de aprendizaje más baja significa que se necesitan más árboles para construir un modelo de complejidad similar. A diferencia de los bosques aleatorios, en los que un valor den_estimatorses siempre mejor, el aumento den_estimatorsen elgradient boostingconduce a un modelo más complejo, lo que puede llevar a un sobreajuste. Una práctica común es ajustarn_estimatorsdependiendo del presupuesto de tiempo y memoria, y luego buscar sobre diferentes tasas de aprendizaje.Otro parámetro importante es
max_depth(o alternativamentemax_leaf_nodes), para reducir la complejidad de cada árbol. Por lo general, la profundidad máxima es muy baja para los modelos de gradiente, a menudo no más allá de cinco divisiones
5.12. Proyecto Integrador de Aprendizaje Automático#
5.12.1. Predicción de churn en telecomunicaciones con modelos de árboles e interpretabilidad#
5.12.2. Objetivo general#
Construir modelos precisos de clasificación utilizando algoritmos como Random Forest, XGBoost, CatBoost y LightGBM, integrados en un flujo de trabajo con Pipeline, ajuste de hiperparámetros mediante GridSearchCV, visualización de importancia de variables y uso de LIME para explicabilidad. Además, se solicita diseñar una arquitectura básica de MLOps para implementar el modelo en un entorno de producción.
5.12.3. Contexto aplicado#
Las empresas de telecomunicaciones enfrentan tasas significativas de pérdida de clientes. La predicción temprana de churn permite intervenir de manera oportuna. A través de modelos supervisados e interpretables, se puede identificar el perfil de clientes con mayor probabilidad de abandono y tomar decisiones informadas.
5.12.4. Dataset recomendado: “Telco Customer Churn”#
Enlace: https://www.kaggle.com/blastchar/telco-customer-churn
Tamaño aproximado: 7 000 registros
Contiene información demográfica, de facturación y uso de servicios, junto con la variable objetivo
Churn(Sí/No)
5.12.5. Actividades a desarrollar#
Cada resultado presentado debe ir acompañado de su correspondiente análisis e interpretación, ya sean figuras, tablas o cualquier otro tipo de evidencia.
Preprocesamiento + Modelado con Pipelines y GridSearchCV
Limpieza de datos y tratamiento de valores faltantes
Codificación de variables categóricas
Escalado de variables numéricas si es necesario
Separación en variables predictoras
Xy variable objetivoyDefinir pipelines que incluyan transformaciones de los ítems anteriores y modelo
Ajustar hiperparámetros mediante
GridSearchCVoxgboostcon GPU
Modelo
Hiperparámetros adicionales recomendados
Descripción breve
Random Forest
min_samples_split,min_samples_leaf,max_features,bootstrap,criterionTamaño mínimo para dividir nodos/interiores/hoja, máximo de features por split, método de bootstrapping, función de criterio (gini/entropy).
XGBoost
subsample,colsample_bytree,gamma,min_child_weight,reg_alpha,reg_lambda,scale_pos_weightProporción de muestras, columnas, regularización L1/L2, sensibilidad a outliers, ajuste clases desbalanceadas.
CatBoost
l2_leaf_reg,bagging_temperature,border_count,random_strength,one_hot_max_size,subsampleRegularización L2, control de bagging, discretización, fuerza de aleatorización, máximo para one-hot, submuestreo.
LightGBM
min_child_samples,min_child_weight,subsample,colsample_bytree,reg_alpha,reg_lambda,max_binTamaño mínimo child, regularización, submuestreo, máximo bins, tasa de samples/col/bins.
Validación cruzada estratificada con cinco particiones
Evaluación del modelo
Cálculo de métricas: precision, recall, accuracy, F1-score, AUC
Matriz de confusión por modelo
Curvas ROC por modelo
Importancia de características
Extraer
feature_importances_de cada modeloGraficar las 10 variables más importantes para cada clasificador
Explicación de predicciones con LIME
Aplicar
LimeTabularExplainersobre instancias específicasVisualizar y analizar las explicaciones para al menos tres casos representativos
Diseño de arquitectura MLOps
Crear un servicio de inferencia con FastAPI que reciba datos nuevos y retorne predicciones. FastAPI es un framework web de Python que permite crear APIs de alto rendimiento de manera rápida y eficiente, utilizando las sugerencias de tipo estándar de Python.
Empaquetar el modelo y la API en una imagen Docker (
Dockerfile). Una API (Interfaz de Programación de Aplicaciones) es un conjunto de reglas y protocolos que permite que dos aplicaciones de software se comuniquen entre sí, intercambiando datos y funcionalidades de una manera bien definida y seguraCrear un flujo de trabajo CI/CD con GitHub Actions que:
Ejecute pruebas unitarias
Verifique calidad del código (linting)
Construya y publique la imagen Docker si las pruebas son exitosas
Incluir sugerencias para monitoreo del modelo (deriva de datos, métricas de producción)
5.12.6. Restricciones didácticas#
Es obligatorio el uso de
PipelineyGridSearchCVSe deben presentar visualizaciones claras y código documentado
El trabajo debe entregarse como notebook reproducible, con todas las decisiones justificadas
Cada resultado presentado debe ir acompañado de su correspondiente análisis e interpretación, ya sean figuras, tablas o cualquier otro tipo de evidencia.
5.12.7. Herramientas sugeridas#
pandas,numpy,scikit-learnxgboost,catboost,lightgbmmatplotlib,seabornlimefastapi,docker,GitHub ActionsEntorno: Jupyter Notebook, Google Colab o VS Code
5.12.8. Entregables esperados#
Notebook con desarrollo completo: ETL, EDA, modelado, evaluación, visualización y análisis
Script de la API (
api.py) basado en FastAPIDockerfile funcional con instrucciones de ejecución
Flujo de trabajo CI/CD (
.github/workflows/ci.yml)Archivo README con descripción del proyecto, instrucciones de uso y arquitectura del servicio
5.12.9. Diseño sugerido del notebook#
Exploración inicial del dataset
Preprocesamiento y codificación + Implementación de pipelines
Entrenamiento y ajuste con
GridSearchCVEvaluación de modelos
Importancia de características
Interpretabilidad con LIME
Descripción del sistema de despliegue
Conclusiones finales
5.12.10. Resumen#
Dataset |
Tarea |
Tamaño estimado |
Ventajas |
|---|---|---|---|
Telco Customer Churn (Kaggle) |
Clasificación |
~7 000 registros |
Real, variables heterogéneas, interpretable |
5.12.11. Instrucciones para el MLOps#
Para construir el entorno de MLOps correspondiente al problema planteado, es necesario instalar las bibliotecas específicas asociadas al despliegue y automatización del flujo de trabajo, además de aquellas requeridas por el modelo y el análisis exploratorio de datos (EDA), con el fin de garantizar su correcto funcionamiento.
python -m pip install --force-reinstall pydantic python -m pip install fastapi[all] python -m pip install joblib python -m pip install pandas
5.12.12. Estructura general del proyecto#
telco-churn-mlops/
├── data/
│ └── telco_churn.csv # Dataset original
├── notebooks/
│ ├── 1_eda_preprocessing.ipynb # Análisis exploratorio
│ ├── 2_model_training.ipynb # Entrenamiento y evaluación
│ └── 3_interpretability.ipynb # LIME
├── app/
│ ├── api.py # FastAPI para inferencia
│ ├── schemas.py # Modelos Pydantic
│ └── model.joblib # Modelo entrenado
├── tests/
│ ├── test_api.py # Pruebas unitarias
│ └── test_model.py # Validación del modelo
├── Dockerfile # Configuración de contenedor
├── requirements.txt # Dependencias
├── .github/workflows/
│ └── ci.yml # CI/CD con GitHub Actions
└── README.md # Documentación
5.12.13. api.py — Servicio FastAPI para predicciones#
from fastapi import FastAPI
from pydantic import BaseModel
import joblib
import numpy as np
app = FastAPI()
model = joblib.load("app/model.joblib")
class CustomerData(BaseModel):
SeniorCitizen: int
MonthlyCharges: float
TotalCharges: float
Contract: str # "Month-to-month", "One year", etc.
PaymentMethod: str # "Electronic check", "Credit card", etc.
@app.post("/predict")
def predict(data: CustomerData):
# Preprocesamiento en memoria (ejemplo simplificado)
features = np.array([
data.SeniorCitizen,
data.MonthlyCharges,
data.TotalCharges,
1 if data.Contract == "Month-to-month" else 0,
1 if data.PaymentMethod == "Electronic check" else 0
]).reshape(1, -1)
prediction = model.predict_proba(features)[0][1] # Probabilidad de churn
return {"churn_probability": float(prediction), "prediction": int(prediction > 0.5)}
Importación de librerías
Se traen herramientas para crear la API (
FastAPI), definir el formato de los datos de entrada (BaseModel), cargar el modelo (joblib), y manipular datos numéricos (numpy).
Creación de la aplicación FastAPI
Variable:app = FastAPI()Se instancia la aplicación web que permitirá recibir y responder solicitudes de predicción.
Carga del modelo de machine learning
Variable:model = joblib.load("app/model.joblib")Se carga desde disco un modelo previamente entrenado, listo para hacer predicciones.
Definición del esquema de datos de entrada
Clase:CustomerData(BaseModel)Se crea una clase para definir claramente qué datos espera la API, los cuales son:
SeniorCitizen: intMonthlyCharges: floatTotalCharges: floatContract: strPaymentMethod: str
Creación del endpoint de predicción
Decorador y función:@app.post("/predict")ydef predict(data: CustomerData):¿Qué es un endpoint?
Es una “puerta de entrada” específica de la API donde los usuarios pueden enviar información y obtener una respuesta. Es como una dirección de correo electrónico, pero para datos entre programas.¿Qué significa el decorador
@app.post("/predict")?
El decorador indica que la función que sigue será accesible para recibir solicitudes POST (envío de datos) en la ruta/predict.postes el tipo de solicitud HTTP (enviar datos, crear algo nuevo)."/predict"es la “dirección” a la que se debe enviar la solicitud para obtener una predicción.
¿Qué hace la función
predict(data: CustomerData):?
La función recibe los datos enviados (siguiendo el esquema deCustomerData) y realiza todo lo necesario para producir una predicción.El parámetro
data: CustomerDatahace que FastAPI espere un JSON con los campos definidos (comoSeniorCitizen,Contract, etc.), lo convierte automáticamente en el objetodatay lo valida.
¿Cómo se usa este endpoint?
Un usuario (o aplicación) envía una solicitud POST al endpoint/predict, incluyendo los datos del cliente. FastAPI recibe esta información, pasa los datos a la función y devuelve una predicción en formato JSON.
Preprocesamiento de los datos de entrada
Dentro depredictSe convierte la información recibida en variables numéricas, transformando las categorías en números que el modelo puede interpretar.
Generación de la predicción
Dentro depredict(uso demodel.predict_proba)El modelo utiliza los datos preparados para calcular la probabilidad de que el cliente se vaya (‘churn’).
Supón que llamaste:
resultado = model.predict_proba(features) print(resultado)
Y obtienes como salida:
[[0.22 0.78]]
resultado[0][0] = 0.22→ Probabilidad de clase 0: el cliente NO se varesultado[0][1] = 0.78→ Probabilidad de clase 1: el cliente SÍ se va
Por lo tanto:
model.predict_proba(features)[0][1]
es la probabilidad (número entre 0 y 1) de que el cliente se vaya (“churn”).
Envío de la respuesta
Dentro depredict(valor de retorno)Se responde con un diccionario que incluye:
La probabilidad estimada del evento (“churn”).
Una predicción binaria: 1 si la probabilidad es mayor a 0.5, 0 si es menor o igual a 0.5.
5.12.14. Dockerfile — Contenerización#
FROM python:3.10-slim
WORKDIR /app
COPY requirements.txt .
RUN pip install --no-cache-dir -r requirements.txt
COPY app/ ./app/
COPY data/ ./data/
EXPOSE 8000
CMD ["uvicorn", "app.api:app", "--host", "0.0.0.0", "--port", "8000"]
FROM python:3.10-slim
Utiliza una imagen base ligera de Python 3.10 para mantener el contenedor simple y pequeño.WORKDIR /app
Establece el directorio de trabajo dentro del contenedor en/app, donde se ejecutarán las siguientes instrucciones y comandos.COPY requirements.txt .
Copia el archivorequirements.txtdesde tu máquina local al directorio de trabajo del contenedor. Este archivo contiene la lista de las dependencias de tu proyecto.RUN pip install --no-cache-dir -r requirements.txt
Instala todas las dependencias de Python listadas enrequirements.txtusando pip.COPY app/ ./app/
Copia tu carpeta de código fuente llamadaapp/al directorio/app/app/del contenedor.COPY data/ ./data/
Copia tu carpeta de datos llamadadata/al directorio/app/data/del contenedor.EXPOSE 8000
Indica que el contenedor usará el puerto 8000 (útil para exponer el servicio FastAPI).CMD ["uvicorn", "app.api:app", "--host", "0.0.0.0", "--port", "8000"]
Indica el comando que arrancará la aplicación al iniciar el contenedor: utilizauvicornpara servir la aplicaciónFastAPI, haciéndola accesible desde cualquier red en el puerto 8000.
5.12.15. requirements.txt#
Este archivo puede generarse de manera automática mediante el comando
pip freeze > requirements.txt, siempre que se ejecute desde el entorno virtual previamente configurado para el desarrollo del entorno MLOps.
fastapi>=0.95.0
uvicorn
scikit-learn
pandas
numpy
joblib
lime
xgboost
catboost
lightgbm
5.12.16. .github/workflows/ci.yml — CI/CD Pipeline#
name: CI Pipeline
on: [push, pull_request]
jobs:
test:
runs-on: ubuntu-latest
steps:
- uses: actions/checkout@v3
- name: Set up Python
uses: actions/setup-python@v4
with:
python-version: 3.10
- name: Install dependencies
run: |
pip install -r requirements.txt
pip install pytest flake8
- name: Run Linter
run: flake8 app/ --ignore=E501,W503
- name: Run Tests
run: pytest tests/
name: CI Pipeline
Nombre descriptivo de este flujo de trabajo (“pipeline”) de integración continua.on: [push, pull_request]
Aquí se indica cuándo se debe ejecutar este pipeline:Cada vez que alguien hace un push (subida de cambios) o crea un pull request (propuesta de cambios) en el repositorio.
jobs:
Conjunto de tareas independientes. Aquí hay una sola tarea llamadatest.test:
El nombre del trabajo principal: “test”, encargado de revisar la calidad y funcionamiento del código.runs-on: ubuntu-latest
Indica que todas las instrucciones de este job se ejecutarán en un servidor virtual con Ubuntu actualizado.- uses: actions/checkout@v3
Clona el código fuente del repositorio en la máquina virtual que ejecuta el pipeline para poder trabajar con él.- name: Set up Python ...
Usa una acción específica para instalar la versión de Python (3.10) necesaria para correr el proyecto.- name: Install dependencies ...
Ejecuta comandos para instalar las dependencias del proyecto (derequirements.txt), y también instala herramientas útiles para pruebas (pytest) y revisión de estilo (flake8).- name: Run Linter
Ejecuta Flake8 sobre la carpetaapp/para revisar el estilo y calidad del código Python, ignorando ciertos errores de formato (E501,W503).- name: Run Tests
Lanza las pruebas automáticas almacenadas en la carpetatests/, usando PyTest.¿Para qué sirve este archivo? Permite asegurar la calidad del código de forma automática: Cada vez que alguien sube o propone cambios, se valida que:
El código sigue buenas prácticas.
Todas las pruebas automáticas pasan correctamente.
Esto ayuda a detectar errores antes de que el código llegue al entorno de producción.
5.12.17. Flujo del Pipeline de Integración Continua (CI)#
Inicio automático:
El pipeline se ejecuta cada vez que se realiza unpusho se crea unpull requesten el repositorio.Clonación del repositorio:
El código fuente se descarga para que pueda ser analizado y probado en un entorno limpio.Configuración del entorno de Python:
Se instala la versión específica de Python (en este caso, 3.10) para asegurar la compatibilidad.Instalación de dependencias:
Se instalan todas las dependencias y herramientas necesarias utilizando los comandos correspondientes depip.Verificación de calidad de código:
Se ejecuta Flake8 para comprobar que el código cumple con las convenciones de estilo establecidas.Detección de errores de estilo:
Si se encuentran errores de estilo, el pipeline se detiene y se solicita corregirlos antes de continuar.Ejecución de pruebas automáticas:
Si no hay errores de estilo, se procede a ejecutar las pruebas automáticas con PyTest para validar la funcionalidad del código.Resultado del pipeline:
Si todas las pruebas pasan, el pipeline finaliza exitosamente y el código está listo para revisión o despliegue.
Si alguna prueba falla, se requiere realizar las correcciones necesarias antes de intentarlo nuevamente.
.github/workflows/ci.ymles un archivo de configuración para que GitHub Actions ejecute automáticamente tareas (como instalar dependencias, correr pruebas, revisar el estilo del código, etc.) cada vez que alguien hace un cambio en el repositorio en GitHub. Debes guardarlo dentro de tu repositorio de GitHub, en la siguiente ruta exacta, y con la extensión.yml(por ejemplo,ci.yml).github/workflows/ci.yml
¿Cómo se usa?
Copia el contenido que mostraste y ponlo en un archivo llamado, por ejemplo,
ci.yml.Ubícalo en la carpeta
.github/workflowsdentro de tu repositorio.Haz un commit y súbelo a GitHub.
A partir de ese momento, cada vez que tú o alguien más haga un
pusho unpull requestal repositorio, GitHub Actions detectará el archivo y ejecutará las tareas automáticamente en sus propios servidores.No tienes que hacer nada en tu computador local. Todo ocurre en la nube, dentro del repositorio en la plataforma de GitHub.
¿Cómo puedes ver los resultados?
En la página web de tu repositorio en GitHub, ve a la pestaña “Actions” (está en la parte superior).
Ahí verás una lista de ejecuciones, sus resultados (éxito o fallo) y los detalles paso a paso de cada ejecución del pipeline.
5.12.18. README.md — Documentación#
# Predicción de Churn en Telecomunicaciones
## Descripción
Proyecto de ML para predecir abandono de clientes (churn) usando Random Forest, XGBoost y técnicas de interpretabilidad.
## Componentes
- `notebooks/`: Análisis, entrenamiento y explicabilidad.
- `app/api.py`: API REST para predicciones.
- `Dockerfile`: Configuración para despliegue.
## Instalación
```bash
pip install -r requirements.txt
uvicorn app.api:app --reload # Desarrollo local
```
## Docker
```bash
docker build -t telco-churn-api .
docker run -p 8000:8000 telco-churn-api
```
## Endpoints
- `POST /predict`: Recibe JSON con features del cliente, retorna probabilidad de churn.
5.12.19. Ejecución de pruebas#
Localmente, ejecutando en la terminal:
uvicorn app.api:app --port 8001, el servidor FastAPI queda corriendo en segundo plano, listo para ejecutar algunas pruebas.El siguiente es un ejemplo de test unitario local usando
uvicorncurl -X POST http://localhost:8001/predict -H "Content-Type: application/json" -d '{"SeniorCitizen": 1, "MonthlyCharges": 99.9, "tenure": 5, "Contract": "Month-to-month", "PaymentMethod": "Bank transfer (automatic)"}'
La salida de este test debe ser la predicción con su respectiva probabilidad:
{"churn_probability":0.96,"prediction":"Yes"}
Entrada (Input): Se está haciendo una solicitud POST (envío de datos) a una API que está escuchando localmente en:
http://localhost:8001/predict
Lo que enviamos es un JSON que representa las características de un cliente, por ejemplo:
Campo
Significado
Valor enviado
SeniorCitizenIndica si el cliente es adulto mayor (1: sí, 0: no)
1MonthlyChargesCuánto paga el cliente al mes
99.9tenureAntigüedad en meses como cliente
5ContractTipo de contrato que tiene el cliente
"Month-to-month"PaymentMethodMétodo de pago
"Bank transfer (automatic)"Idea clave: Le estamos preguntando al modelo: “¿Qué probabilidad tiene este cliente de irse (churn) dadas estas características?”
Salida (Output): El servidor devuelve también un JSON como respuesta:
{"churn_probability":0.96,"prediction":"Yes"}
Campo
Significado
churn_probabilityProbabilidad calculada por el modelo de que el cliente abandone la compañía (valor entre 0 y 1). En este caso,
0.96indica un 96% de probabilidad.predictionPredicción final del modelo:
"Yes"indica que el modelo predice que el cliente probablemente se irá.
Para poder realizar estas pruebas desde el contenedor Docker de forma persistente y poder iniciarlo/detenerlo fácilmente desde su aplicación, debe tener en cuenta estos pasos:
Construir y Ejecutar por Primera Vez (crea el contenedor persistente). Nótese que se usó un puerto diferente al local. Además, recuerde que debe tener iniciada la aplicación
Dockerdocker build -t telco-churn . && docker run -d --name telco-churn-container -p 8000:8000 telco-churn
Utilizamos los siguientes pasos para
iniciar,deteneryver estadodocker start telco-churn-container docker stop telco-churn-container docker ps -a | grep telco-churn
El siguiente es un ejemplo de test unitario desde
Dockerusandouvicorncurl -X POST http://localhost:8000/predict -H "Content-Type: application/json" -d '{"SeniorCitizen": 1, "MonthlyCharges": 99.9, "tenure": 5, "Contract": "Month-to-month", "PaymentMethod": "Bank transfer (automatic)"}'
La salida de este test debe ser la predicción con su respectiva probabilidad:
{"churn_probability":0.96,"prediction":"Yes"}