
11. Apéndice#
En este apéndice, resumimos algunas definiciones y teoremas básicos sobre los
espacios de Hilberty elanálisis convexo. No se proporcionan pruebas, el lector interesado puede consultar libros más especializados, que se indican en las referencias.
Definition 11.1 (Espacios lineales)
Un conjunto no vacío de elementos, \(V\), se llama espacio lineal si hay definidas dos operaciones, adición y multiplicación escalar, de modo que se cumplen las siguientes propiedades:
\(\boldsymbol{x}+\boldsymbol{y}=\boldsymbol{y}+\boldsymbol{x},\quad\forall\,\boldsymbol{x},\boldsymbol{y}\in V\)
\((\boldsymbol{x}+\boldsymbol{y})+\boldsymbol{z}=\boldsymbol{x}+(\boldsymbol{y}+\boldsymbol{z}),\quad\forall~\boldsymbol{x}, \boldsymbol{y}, \boldsymbol{z}\in V\)
Existe un elemento \(\boldsymbol{0}\in V\), conocido como el vector cero, tal que, \(\forall\boldsymbol{x}\in V,~\boldsymbol{x}+\boldsymbol{0}=\boldsymbol{x}\)
\(\forall~x\in V\), existe un \(\boldsymbol{y}\in V\) tal que \(\boldsymbol{x}+\boldsymbol{y}=0\).
Para cada par de escalares \(\alpha, \beta\in\mathbb{C}\) y \(\forall~\boldsymbol{x},\boldsymbol{y}\in V\),
Para cada par de escalares \(\alpha,\beta\in\mathbb{C},~\forall~\boldsymbol{x}\in V,\quad (\alpha+\beta)\boldsymbol{x}=\alpha\boldsymbol{x}+\beta\boldsymbol{x}\)
\(\forall\boldsymbol{x}\in V\), y el escalar \(1\in\mathbb{C},\quad 1\boldsymbol{x}=\boldsymbol{x}\)
Los espacios lineales se denominan a veces espacios vectoriales y los elementos de \(V\) vectores. Si los escalares \(\alpha, \beta\) están restringidos en \(\mathbb{R}\), entonces el espacio lineal se conoce como espacio lineal real; de lo contrario, si \(\alpha, \beta \in\mathbb{C}\), el espacio lineal se conoce como espacio lineal complejo.
Example 11.1 (El espacio vectorial \(\mathbb{R}^{l}\))
El conjunto de \(l-\)tuplas \(\boldsymbol{x}:=(x_{1}, x_{2},\dots, x_{l}),~x_{i}\in\mathbb{R},~i=1,2,\dots,l\), es un espacio vectorial real, donde la adición y la multiplicación están definidas como
Example 11.2
Sea el conjunto de todas las funciones reales
donde \(\boldsymbol{f}\) denota la función general, en vez de la evaluación en un punto especifico \(x\in\mathbb{R}\). Entonces \(\mathcal{F}(\mathbb{R})\) es un espacio lineal real con respecto a las siguientes operaciones
Definition 11.2
Sea \(V\) un espacio lineal y \(S\) un conjunto no vacio, \(S\subseteq V\). Entonces \(S\) es llamado un subespacio de \(V\) si
\(\forall\boldsymbol{x}, \boldsymbol{y}\in S,\quad \boldsymbol{x}+\boldsymbol{y}\in S\)
\(\forall a\in\mathbb{C}\), y \(\boldsymbol{x}\in S,~a\boldsymbol{x}\in S\)
Definition 11.3 (Independencia Lineal)
Sea \(V\) un subespacio lineal y \(S\subseteq V\). Decimo que \(S\) es linealmente independiente si existe un número finito de elementos distintos, \(x_{k}\in S,~i=1,2,\dots,K\), tal que
para alguna combinación de escalares \(a_{k}\in\mathbb{C},~k=1,2,\dots,K\), los cuales no son todos ceros. Si este no es el caso, el conjunto \(S\) es linealmente independiente
Definition 11.4 (Subespacio generado)
Sea \(S\) un subconjunto no vacio \(S\subseteq V\). El conjunto de todas las combinaciones lineales posibles, denotado como \(\text{span}\{S\}\),
y es conocido como el \(\textbf{generado}\) de \(S\). Note que \(\text{span}\{S\}\) es siempre un subespacio de \(V\). Además si \(\text{span}\{S\}=V\), decimos que \(S\) genera al espacio \(V\).
Definition 11.5 (Bases)
Sea \(V\) un subespacio lineal y \(S\subseteq V\). El conjunto \(S\) es conocido como base de \(V\), si y solo si:
\(S\) es linealmente independiente
\(S\) genera a \(V\)
Si el número de elementos que componen \(S\) es finito, decimos que \(V\) es de dimensión finita y el número de elementos distintos de S define la dimensión de \(V\). Si el número de elementos de \(S\) no es finito, decimos que \(V\) es de dimensión infinita.
Nótese que no hay una base única en \(V\). Sin embargo, cualquier base de \(V\) tiene el mismo número de elementos. Además, se ha demostrado que todo espacio lineal tiene una base. Esto se conoce como el Lema de Zorn. Sin embargo, encontrar una base no es necesariamente una tarea trivial. La dimensión de \(\mathbb{R}^{l}\) es \(l\), y el espacio lineal \(\mathcal{F}(\mathbb{R})\) es de dimensión infinita.
Espacio vectorial de polinomios en \(x\) con coeficientes racionales
Sea \(P\) el espacio vectorial de todos los polinomios en \(x\) con coeficientes racionales, con la adición de polinomios habitual como suma de vectores y la multiplicación de un polinomio por un número racional como multiplicación por escalar. Afirmamos que \(P\) es de dimensión infinita.
En efecto. Supongamos, por el contrario, que \(P\) es generado por \(k\) polinomios en \(P\), \(\{p_{1}, p_{2},\dots,p_{k}\}\). Sea \(m\) el máximo de los grados de estos \(k\) polinomios.
Entonces \(x^{m+1}\) es un vector en \(P\), pero no puede ser escrito como una combinación lineal de \(\{p_{1}, p_{2}, \dots, p_{k}\}\) porque tomar combinaciones lineales de polinomios de grado como máximo \(m\) no puede dar polinomios de grado mayor que \(m\).
Por lo tanto, \(x\) no está en el generado de \(\{p_{1}, p_{2},\dots,p_{k}\}\), lo cual es una contradicción.
Definition 11.6 (Espacio con producto interno)
Sea \(V\) un espacio lineal. El producto interno es una función
la cual asigna un valor en \(\mathbb{C}\), denotado \(\langle\boldsymbol{x}, \boldsymbol{y}\rangle\), para cada punto de elementos \(\boldsymbol{x}, \boldsymbol{y}\in V\), con las siguientes propiedades:
\(\langle\boldsymbol{x}, \boldsymbol{y}\rangle\geq0\), y \(\langle\boldsymbol{x}, \boldsymbol{y}\rangle=0\) si y solo si \(\boldsymbol{x}=0\)
\(\langle\boldsymbol{x}+\boldsymbol{y}, \boldsymbol{z}\rangle=\langle\boldsymbol{x}, \boldsymbol{z}\rangle+\langle\boldsymbol{y}, \boldsymbol{z}\rangle\)
\(\langle a\boldsymbol{x}, \boldsymbol{y}\rangle=a\langle\boldsymbol{x}, \boldsymbol{y}\rangle\)
\(\langle\boldsymbol{x}, \boldsymbol{y}\rangle=\langle\boldsymbol{y}, \boldsymbol{x}\rangle^{\star}\)
donde \(\star\) denota la conjugación compleja. Un espacio donde un producto interno a sido definido es conocido como un espacio con producto interno.
Definition 11.7
Consideremos el espacio vectorial \(\mathbb{C}^{l}\). Entonces la operación
es un producto interno con \(\boldsymbol{x}, \boldsymbol{y}\in\mathbb{C}^{l}\).
Definition 11.8 (Norma y espacios normados)
Sea \(V\) un espacio lineal. Una norma es una función
que asigna un número real positivo a cada \(\boldsymbol{x}\in V\), esta es denotada como \(\|\boldsymbol{x}\|\) y tiene las siguientes propiedades
\(\|\boldsymbol{x}\|\geq0,\quad\) \(\|\boldsymbol{x}\|=0\quad\text{sii}\quad\boldsymbol{x}=\boldsymbol{0}\)
\(\|a\boldsymbol{x}\|=|a|\|\boldsymbol{x}\|,\quad\forall a\in\mathbb{C},\quad\text{y}\quad\boldsymbol{x}\in V\)
\(\|\boldsymbol{x}+\boldsymbol{y}\|\leq\|\boldsymbol{x}\|+\|\boldsymbol{y}\|,\quad\forall\boldsymbol{x}, \boldsymbol{y}\in V\).
Dado un espacio lineal, podemos definir diferentes normas. Por ejemplo, el espacio vectorial \(\mathbb{C}^{l}\). Entonces definimos la norma \(l_{p}\) como
Se puede demostrar que la definición anterior cumple con todas las propiedades requeridas para que una función sea una norma. Para \(p = 1\), nos referimos a la norma \(l_{1}\) y para \(p = 2\) se conoce como \textbf{norma euclidiana} o norma \(l_{2}\). Nótese que esta última resulta de la operación de producto interior, es decir,
Esto es válido para cualquier espacio lineal de producto interno. Es decir, dado un espacio lineal con producto interno, \(V\), con \(\langle\cdot,\cdot\rangle\), entonces la operación de producto interior induce una norma, es decir
Theorem 11.1 (Desigualdad de Cauchy-Schwarz)
Sea \(V\) un espacio de producto interno y el reproductor por la norma del producto interior. Entonces
Esta es una de las propiedades más fundamentales e importantes en la teoría de los espacios lineales. Una consecuencia directa de la desigualdad de Cauchy-Schwarz son las siguientes propiedades: Dado un espacio vectorial interior y su norma inducida \(\|\boldsymbol{x}\|\), entonces
\(\left|\|\boldsymbol{x}\|-\|\boldsymbol{y}\|\right|\leq\|\boldsymbol{x}-\boldsymbol{y}\|\)
\(\|\boldsymbol{x}+\boldsymbol{y}\|^{2}+\|\boldsymbol{x}-\boldsymbol{y}\|=2\left(\|\boldsymbol{x}\|^{2}+\|\boldsymbol{y}\|^{2}\right)\).
Esta última se conoce como la ley del paralelogramo. Nótese que, todas estas propiedades, que pueden conocerse a partir de la geometría básica, son válidas para cualquier espacio lineal, incluso para los de dimensión infinita.
Example 11.3 (El espacio \(l^{2}\))
Este es el espacio lineal de todas las sucesiones
con producto interno
el cual induce la norma que satisface la siguiente propiedad
Example 11.4 (El espacio \(L^{2}\))
Este es el espacio lineal de todas las funciones integrables
con producto interno
el cual induce la norma que satisface la propiedad
Definition 11.9 (Convergencia, Sucesiones de Cauchy y Espacios Completos)
Sea \(V\) un espacio lineal normado y sea \(\boldsymbol{x}_{1}, \boldsymbol{x}_{2},\dots,\boldsymbol{x}_{n},\dots\) una sucesión de elementos en \(V\). Decimos que la sucesión converge a \(\boldsymbol{x}\) si
Nótese que si \(\boldsymbol{x}\) existe, este es único y es conocido como el límite de \(\boldsymbol{x}_{n}\).
Una sucesión de elementos en un espacio lineal normado \(V\) es llamada una sucesión de Cauchy si esta satisface
En otras palabras, la norma de la diferencia de cualquier par de elementos en la sucesión tiende a cero. Se puede demostrar que toda sucesión convergente es de Cauchy, el sentido contrario de esta afirmación no siempre es cierto.
Un espacio lineal normado \(V\), en el que cada sucesión de Cauchy converge en \(V\) se dice que es completo. Nótese que cualquier espacio lineal de dimensión finita es completo. Sin embargo, esto no es siempre verdadero para espacios de dimensión infinita.
Definition 11.10 (Espacios de Hilbert)
Un espacio con producto interno, el cual es completo con respecto a la norma inducida por el producto interno es llamado un espacio de Hilbert.
Ejemplos de espacios de Hilbert son \(l^{2}\) y \(L^{2}\). También los espacios vectoriales \(\mathbb{C}^{l}\) y \(\mathbb{R}^{l}\), equipados con la operación de producto interno Definition 11.7 y la norma Euclideana definida por (11.1), conocidos como espacios Euclidianos son casos especiales de espacios de Hilbert de dimensión finita. Los espacios \(l^{2}\) y \(L^{2}\) son de dimensión infinita. Nótese que \(\mathbb{C}^{l}\), equipado con la norma \(l_{p},~ p\neq2\), no es un espacio de Hilbert, debido a que esta norma no es inducida por un producto interno.
Definition 11.11 (Subsespacio cerrado)
Sea \(H\) un espacio de Hilbert y \(S\subseteq H\). Decimos que \(S\) es un subespacio cerrado de \(H\), si para toda \(\{x_{n}\}\subseteq S\), esto es, cualquier sucesión de elementos de \(S\), que converge a un elemento \(x\in H\), se tiene que \(x\in S\).
Theorem 11.2
Sea \(H\) un espacio de Hilbert y \(\varphi_{1}, \varphi_{2},\dots, \varphi_{m}\in H\) donde \(m<\infty\). Entonces el espacio lineal generado \(\text{span}\{\varphi_{1}, \varphi_{2},\dots, \varphi_{m}\}\) es un subespacio cerrado de \(H\).
Definition 11.12
Sea \(A\) un subconjunto no vacio de un espacio de Hilbert \(H\). Entonces, el conjunto de todos los vectores ortogonales a \(A\), dentoado por \(A^{\perp}\), es llamado el complemento ortogonal de \(A\) y se define de las siguiente manera
Theorem 11.3 (Descomposición ortogonal)
Si \(M\) es un subespacio cerrado de un espacio de Hilbert \(H\), entonces
Definition 11.13
Un subconjunto no vacio \(C\) de un espacio de Hilbert \(H\), esto es \(C\subseteq H\), es llamado convexo, si \(\forall~\boldsymbol{x}_{1}, \boldsymbol{x}_{2}\in C\) y \(\forall\lambda\in [0,1]\) se tiene que
Nótese que si \(\lambda=1\) entonces \(\boldsymbol{x}=\boldsymbol{x}_{1}\), y si \(\lambda=0\) entonces \(\boldsymbol{x}=\boldsymbol{x}_{2}\). para cualquier otro \(\lambda\in[0, 1]\) se tiene que \(\boldsymbol{x}\) cae dentro de la línea que conecta \(\boldsymbol{x}_{1}\) con \(\boldsymbol{x}_{2}\). La ecuación (11.2) puede escribirse como
Por ejemplo, la función \(f:\mathbb{R}\longrightarrow\mathbb{R}\) definida por \(f(x)=|x|\) es una función convexa. Observe que \(\forall x_{1}, x_{2}\in\mathbb{R}\) se tiene que
Definition 11.14
Una función \(f:\mathcal{X}\subset\mathbb{R}^{l}\longrightarrow\mathbb{R}^{l}\) es llamada convexa si \(\mathcal{X}\) es convexo y si \(\forall~\boldsymbol{x}_{1}, \boldsymbol{x}_{2}\in\mathcal{X}\) se tiene que:
Si la desigualdad se mantiene estrica decimos que \(f\) es estrictamente convexa. Además, en este caso el gráfico de la línea queda por encima de \(f(\boldsymbol{x})\)
Theorem 11.4
Sea \(\mathcal{X}\subset\mathbb{R}^{l}\) convexo y \(f:\mathcal{X}\longrightarrow\mathbb{R}\) diferenciable. Entonces \(f(\cdot)\) es convexa si y solo si, \(\forall~\boldsymbol{x}, \boldsymbol{y}\in\mathcal{X}\),
Decimos que el vector \(\nabla^{T}f(\boldsymbol{x})\) es el
subgradiente de\(f\)en\(x\) si satisface la desigualdad (11.3).
Esto es el grafico de la función convexa está ubicado por encima del gráfico de la función afín
\[\begin{split} \\[1mm] g:y\longrightarrow\nabla^{T}f(\boldsymbol{x})(\boldsymbol{y}-\boldsymbol{x})+f(\boldsymbol{x}), \end{split}\]la cual define el hiperplano tangente a la gráfica de \(f\) en \((\boldsymbol{x}, f(\boldsymbol{x}))\).
Theorem 11.5
Sea \(\mathcal{X}\subset\mathbb{R}^{l}\) convexo. Entonces una función doblemente diferenciable \(f:\mathcal{X}\longrightarrow\mathbb{R}\), es convexa (estrictamente convexa) si y solo si la matriz Hessian es semi definida positiva (definida positiva).
Por ejemplo considere la función cuadratica
\[\begin{split} \\[1mm] f(\boldsymbol{x}):=\frac{1}{2}\boldsymbol{x}^{T}Q\boldsymbol{x}+\boldsymbol{b}^{T}\boldsymbol{x}+c, \end{split}\]donde \(Q\) es una matriz definida positiva. Nótese que el gradiente está dado por
\[\begin{split} \\[1mm] \nabla f(\boldsymbol{x})=Q\boldsymbol{x}+\boldsymbol{b}, \end{split}\]y la matriz Hessiana es igual a \(Q\), la que por hipótesis es definida positiva, por lo tanto \(f\) es una función estrictamente convexa.
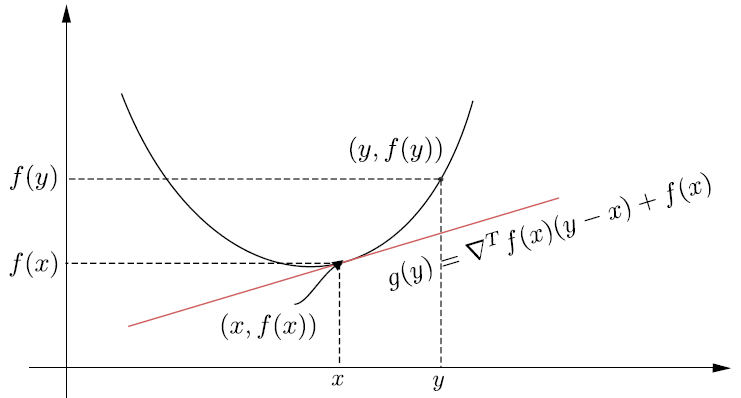
Fig. 11.1 Gráfica de una función convexa.#